Last Updated or created 2022-05-28
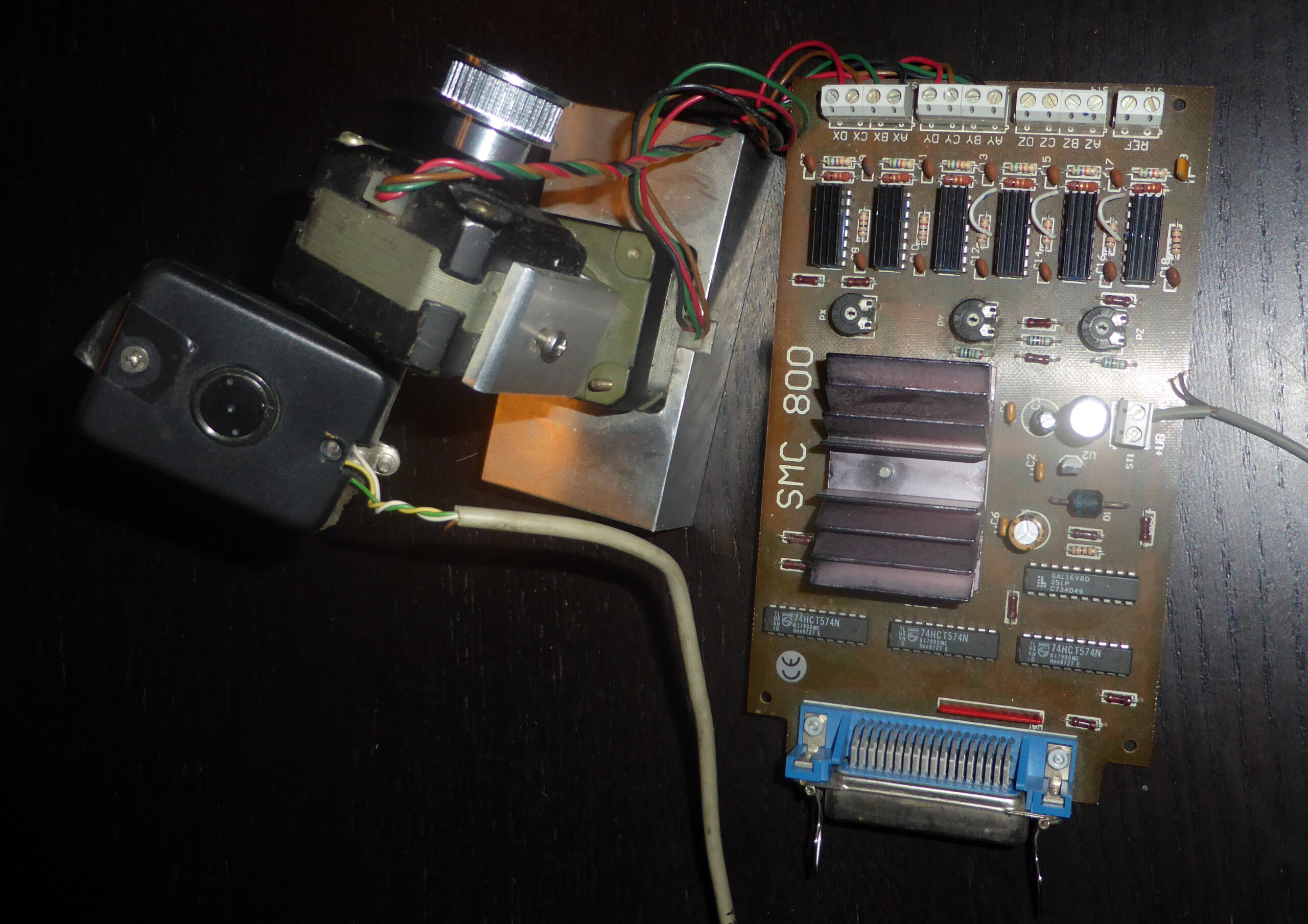
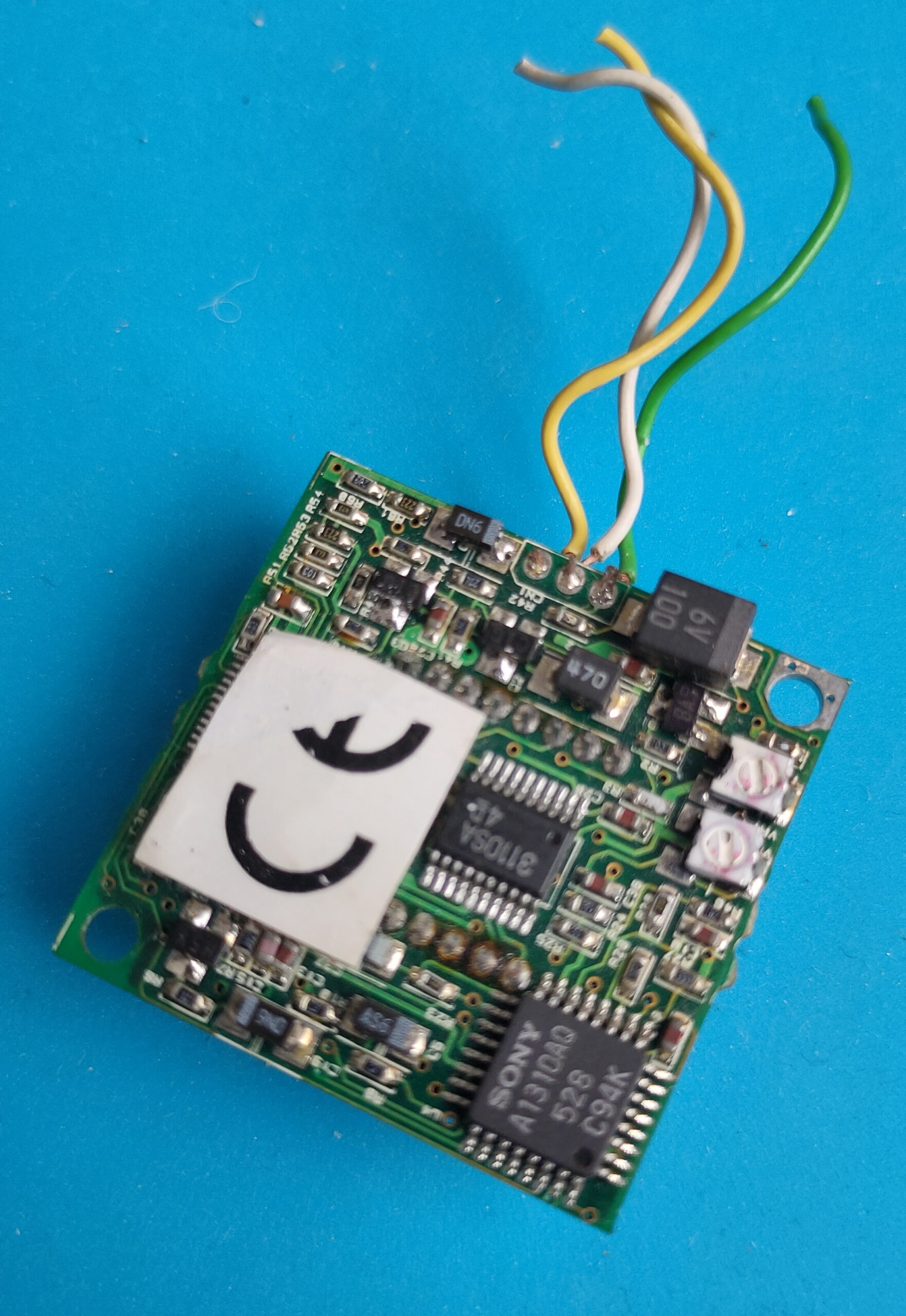
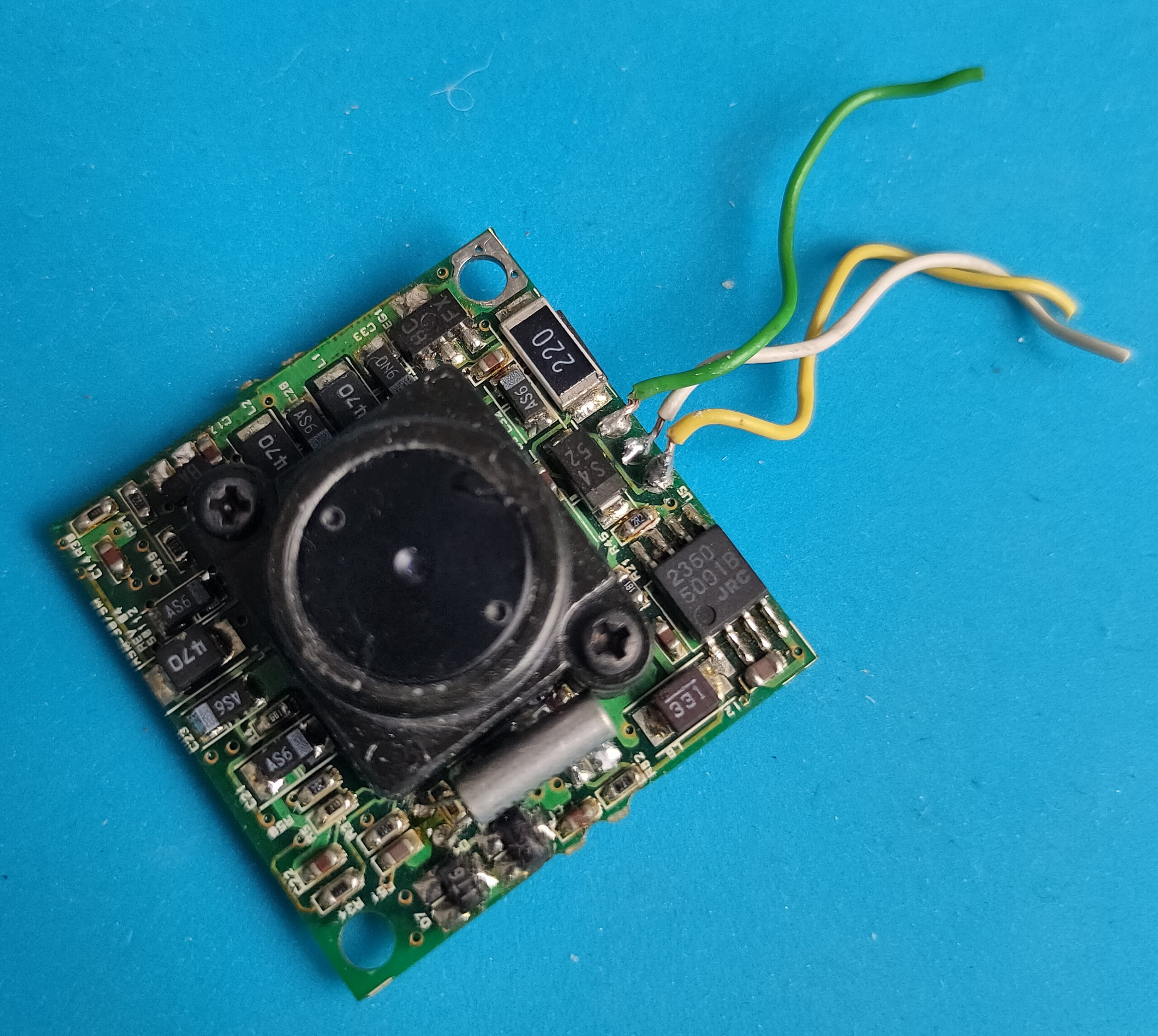
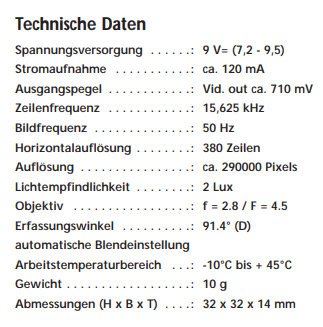
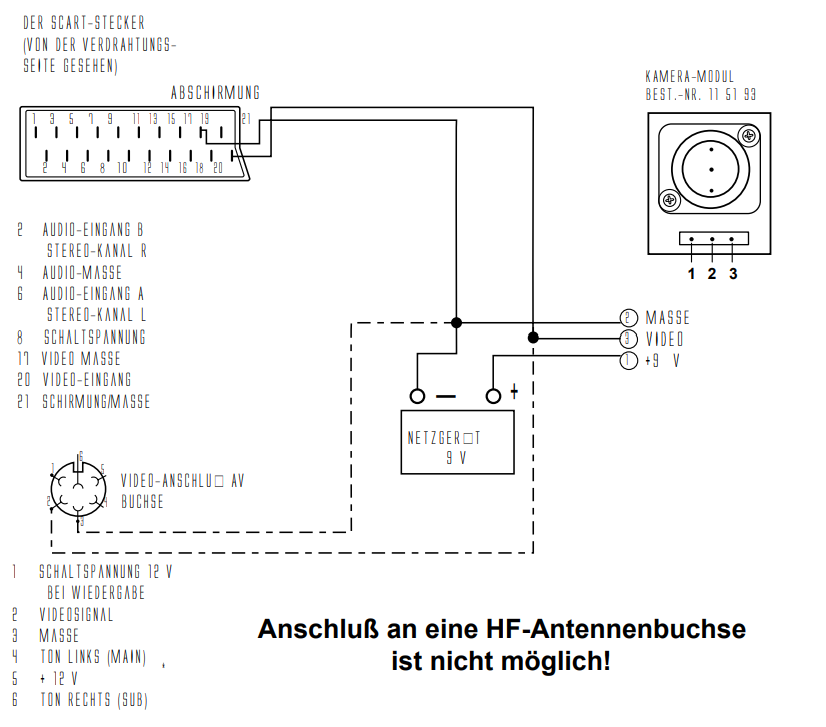
Using a steppermotor controller with two motors. A video capturing device (videoblaster) and a mini B/W camera.


- Up/down/left/right and diagonal
- Red double speed green single speed
- Reset view
- 2 Presets with save and recall

Written software in html and some CGI scripts.
Perl and C.
#include <asm/io.h>
# C Code for moving left
int main(int agrc,char agrv[])
{
int i,wachten;
int richting1[8]={0x27,0x2d,0x1c,0x0d,0x03,0x09,0x38,0x29};
int richting2[8]={0x29,0x38,0x09,0x03,0x0d,0x1c,0x2d,0x27};
ioperm(0x378,3,1);
ioperm(0x37a,3,1);
wachten=100;
for (i=0; i<=7; i=i+1)
{
outb(richting2[i], 0x378);
outb(1, 0x37a);
usleep(wachten);
outb(0, 0x37a);
usleep(wachten);
outb(1, 0x37a);
usleep(wachten);
}
return(0);
}
#!/usr/bin/perl
# Perl CGI script
# Uses 204 no content trick to stay on same page
use LWP::Simple;
my $img = get ('http://10.1.0.1/cgi-bin/left.cgi');
print "Status: 204 No content\n\n";
Streaming video was done using progressive JPG push.
Later i used the capturing command in the loop below.
#!/bin/sh
# push jpg, and update after 1sec
# output mime header
echo Content-type: multipart/x-mixed-replace;boundary=--WebcamRules\n
echo
echo --WebcamRules
# create stream
while true; do
echo Content-type: image/jpeg
echo
cat /var/lib/httpd/htdocs/webcam.jpg
echo
echo --WebcamRules
sleep 1
done
Steppermotor card was using a parallel port.