15 Feb of this year my Concertina was deliverd on my doorstep.
It is a Wren 2 Anglo C/G Concertina by McNeela. A affordable good instrument.
Features
30 button Anglo Concertina in the key of C/G
Fully chromatic
Measures 6.3″ across the flats (16cm)
8 fold bellows
Steel reeds
Loud, crisp tone
Durable black buttons
Wheatstone/Lachenal layout
Excellent response
Easy to play
Lightweight concertina – easy to handle for all ages
Traditional size – unlike other bulky beginner concertinas
Softer, more comfortable, adjustable hand-straps – suitable for both children and adults
Finished with improved stylish gloss exposed-grain wood
Comes with a complimentary Concertina Padded Hard Case
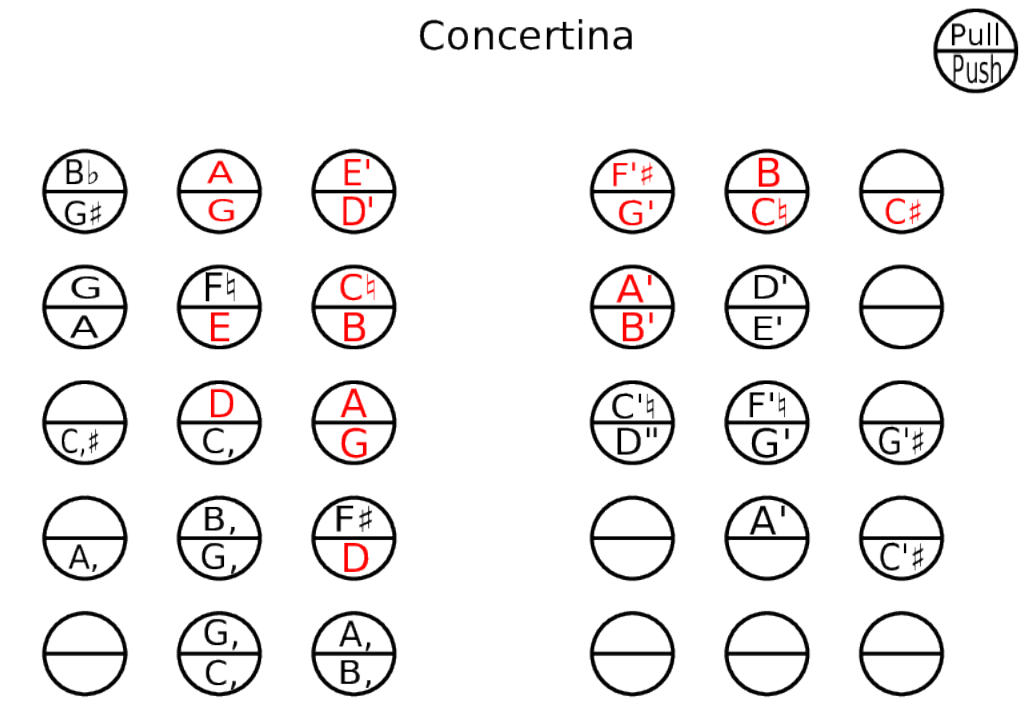
The word concertina refers to a family of hand-held bellows-driven free reed instruments constructed according to various systems, which differ in terms of keyboard layout, and whether individual buttons (keys) produce the same (unisonoric) or different (bisonoric) notes with changes in the direction of air pressure. It is weird playing two notes with the same button, but i gives you a broader tonal range. Some notes are double, one on the pull action and one on the push action. When playing for a while it is possible to switch between those two to be able to play faster. Because you can use the same pull or push as you already where playing, or the button is close by the one you already play.
A little diagram i drew myself using inkscape to learn the buttons i needed. (Blanks also have notes)
So i had a little problem with the pull motion of the right hand A’ B’. I didn’t want to send my Concertina back (Still has garantee, i know) But sending it back to Ireland will take a while and has postal costs. (I’ve fixed my Accordeon also, so why not try to fix it myself?) (… aaand i was curious of the insides )
I had to look at the inner workings for a minute, and finding the right reed. The middle picture above shows a white plastic strip, one of them was stuck. Moving it a little and carefully bending it, got it free and moveable again.
On with the lessons from Caitlin Nic Gabhann again! https://www.youtube.com/watch?v=Z3tPzc6kKM0
2023 Repair:
One of the reeds fell off! It was not glued properly. A 5 minute fix!
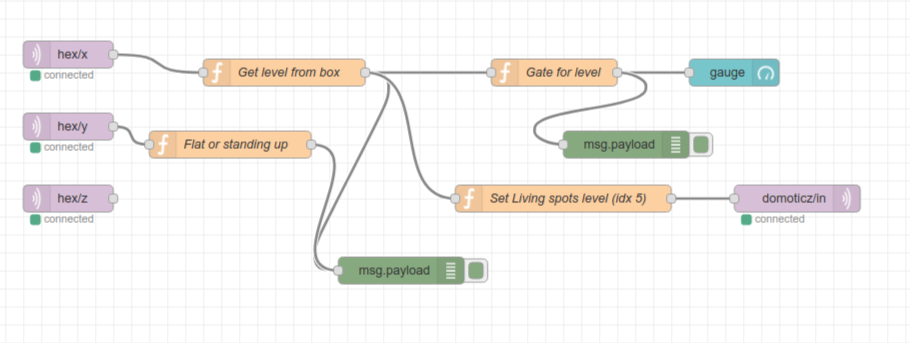
Put the box flat on the table to switch off. When you put it on one side, it will controll your lights brightness. 20,40,60,80 and 100%, just by rotating and putting it down on its sides.
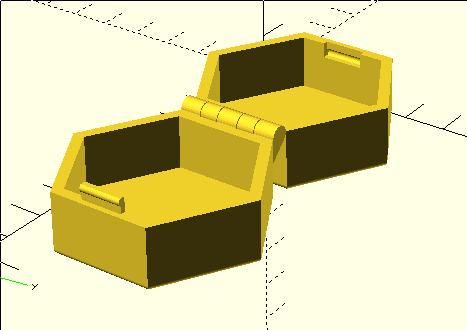
3D printed case
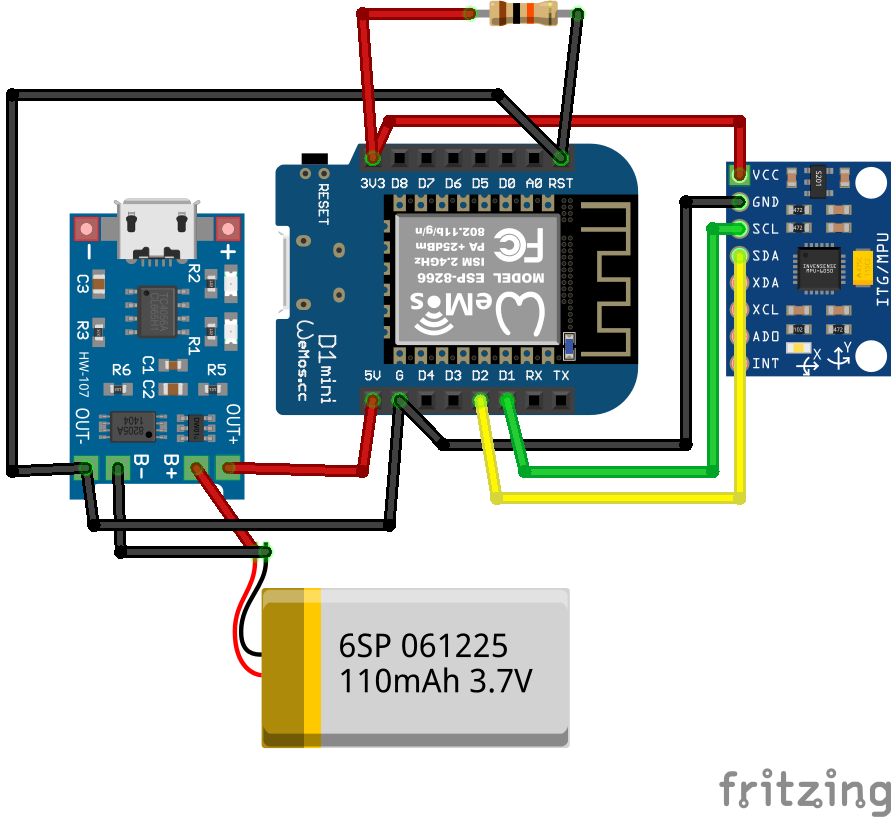
Schematics (without the wireless charging part)
Wireless part
Node-Red Controll part (source below)
Nice to have’s : Arduino-sleep mode, wakeup with a movement sensor.
Arduino Code
#include <Wire.h>
//#include <SPI.h>
#include <PubSubClient.h>
//#include <string.h>
//#include <stdio.h>
#include <ESP8266WiFi.h>
// Wifi settings
const char* ssid = "xxxxxx";
const char* password = "xxxxxxxxxx";
const char* mqtt_server = "10.1.0.17";
// I2C address of the MPU-6050 - 0x68 or 0x69 if AD0 is pulled HIGH
const int MPU = 0x68;
int16_t AcX, AcY, AcZ, GyX, GyY, GyZ;
float gForceX, gForceY, gForceZ, rotX, rotY, rotZ;
// Wifi MAC address
byte mac[]= { 0xDE, 0xED, 0xBA, 0xFE, 0xFE, 0xED };
WiFiClient espClient;
IPAddress ip;
PubSubClient mqttClient(espClient);
// IP address of your MQTT server
const char* server = "10.1.0.17";
//const char* outTopic = "test/";
//const char* server = "iot.eclipse.org";
void dataReceiver(){
Wire.beginTransmission(MPU);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU,14,true); // request a total of 14 registers
AcX = Wire.read()<<8|Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY = Wire.read()<<8|Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ = Wire.read()<<8|Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
GyX = Wire.read()<<8|Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
GyY = Wire.read()<<8|Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
GyZ = Wire.read()<<8|Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
processData();
}
void processData(){
gForceX = AcX / 16384.0;
gForceY = AcY / 16384.0;
gForceZ = AcZ / 16384.0;
rotX = GyX / 131.0;
rotY = GyY / 131.0;
rotZ = GyZ / 131.0;
}
void debugFunction(int16_t AcX, int16_t AcY, int16_t AcZ, int16_t GyX, int16_t GyY, int16_t GyZ){
// Print the MPU values to the serial monitor
Serial.print("Accelerometer: ");
Serial.print("X="); Serial.print(gForceX);
Serial.print("|Y="); Serial.print(gForceY);
Serial.print("|Z="); Serial.println(gForceZ);
Serial.print("Gyroscope:");
Serial.print("X="); Serial.print(rotX);
Serial.print("|Y="); Serial.print(rotY);
Serial.print("|Z="); Serial.println(rotZ);
}
void reconnect() {
// Loop until we're reconnected
while (!mqttClient.connected()) {
Serial.print("Attempting MQTT connection...");
// Attempt to connect
if (mqttClient.connect("arduinoClient")){
Serial.println("connected");
}
else {
Serial.print("failed, rc=");
Serial.print(mqttClient.state());
Serial.println(" try again in 5 seconds");
// Wait 5 seconds before retrying
delay(1000);
}
}
}
void setup(){
Serial.begin(9600);
setup_wifi();
Wire.begin(0,2);
Wire.beginTransmission(MPU);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
mqttClient.setServer(server, 1883);
// Ethernet.begin(mac);
// ip = Ethernet.localIP();
Serial.println(ip);
Serial.println(server);
//delay(1500);
}
char* init(float val){
char buff[100];
for (int i = 0; i < 100; i++) {
dtostrf(val, 4, 2, buff); //4 is mininum width, 6 is precision
}
return buff;
}
void setup_wifi() {
delay(10);
// We start by connecting to a WiFi network
Serial.println();
Serial.print("Connecting to ");
Serial.println(ssid);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
Serial.println("IP address: ");
Serial.println(WiFi.localIP());
}
void dataAcc(){
char mpu6050X[100]= "";
strcat(mpu6050X,init(gForceX));
char mpu6050Y[100]= "";
strcat(mpu6050Y,init(gForceY));
char mpu6050Z[100]= "";
strcat(mpu6050Z,init(gForceZ));
// accelerometer - "topic, mpu6050"
mqttClient.publish("AcX/", mpu6050X);
mqttClient.publish("AcY/", mpu6050Y);
mqttClient.publish("AcZ/", mpu6050Z);
// mqttClient.publish(outTopic, "text to send via mqtt");
}
void dataGy(){
char mpu6050X[100]= "";
strcat(mpu6050X,init(rotX));
char mpu6050Y[100]= "";
strcat(mpu6050Y,init(rotY));
char mpu6050Z[100]= "";
strcat(mpu6050Z,init(rotZ));
// gyroscope - "topic, mpu6050"
mqttClient.publish("GyX/", mpu6050X);
mqttClient.publish("GyY/", mpu6050Y);
mqttClient.publish("GyZ/", mpu6050Z);
// mqttClient.publish(outTopic, "text to send via mqtt");
}
void loop(){
dataReceiver();
debugFunction(AcX,AcY,AcZ,GyX,GyY,GyZ);
if (!mqttClient.connected()) {
reconnect();
}
mqttClient.loop();
dataAcc();
dataGy();
delay(2000);
}