Last Updated or created 2026-03-27
I’ve posted this last time
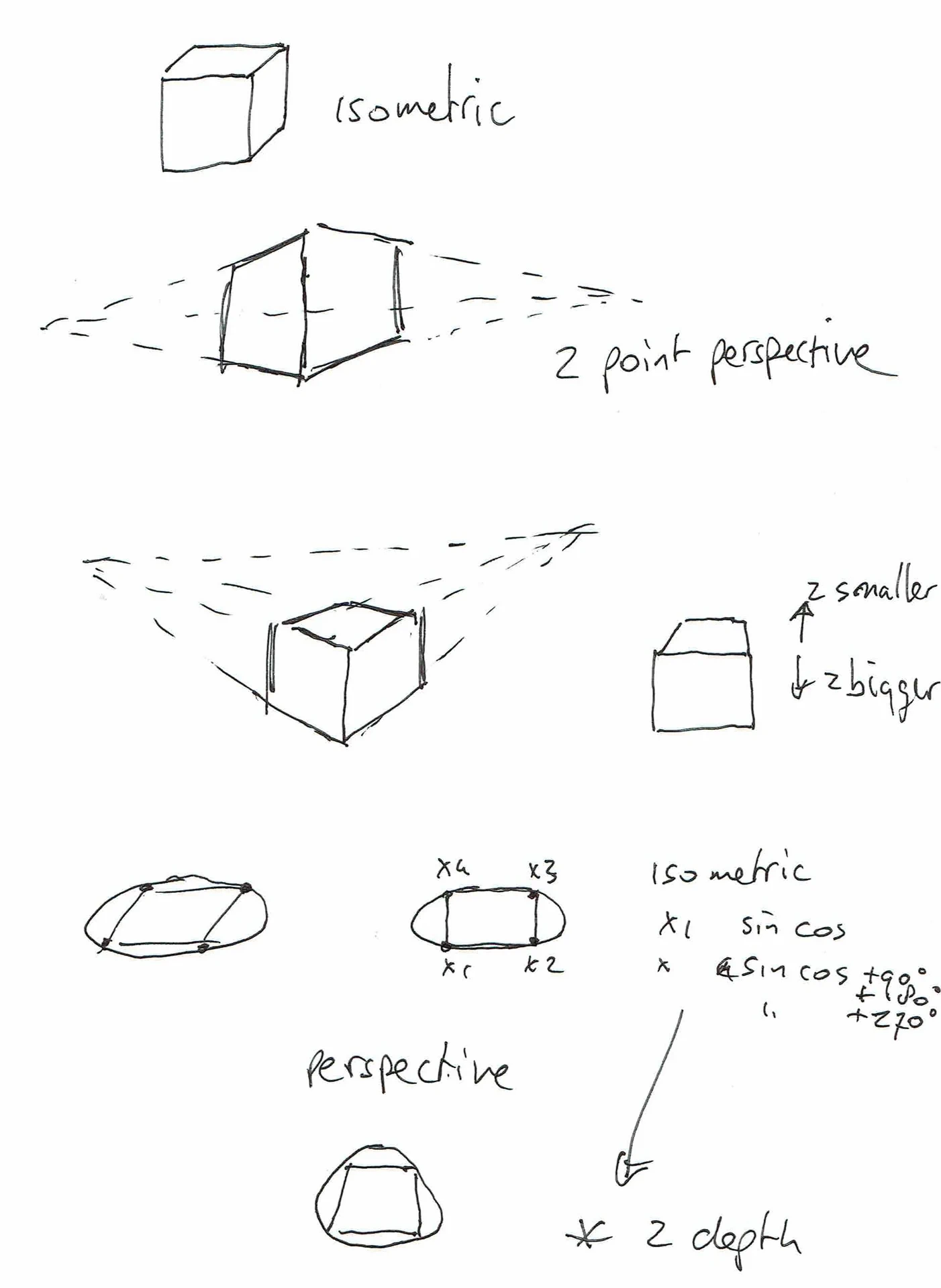
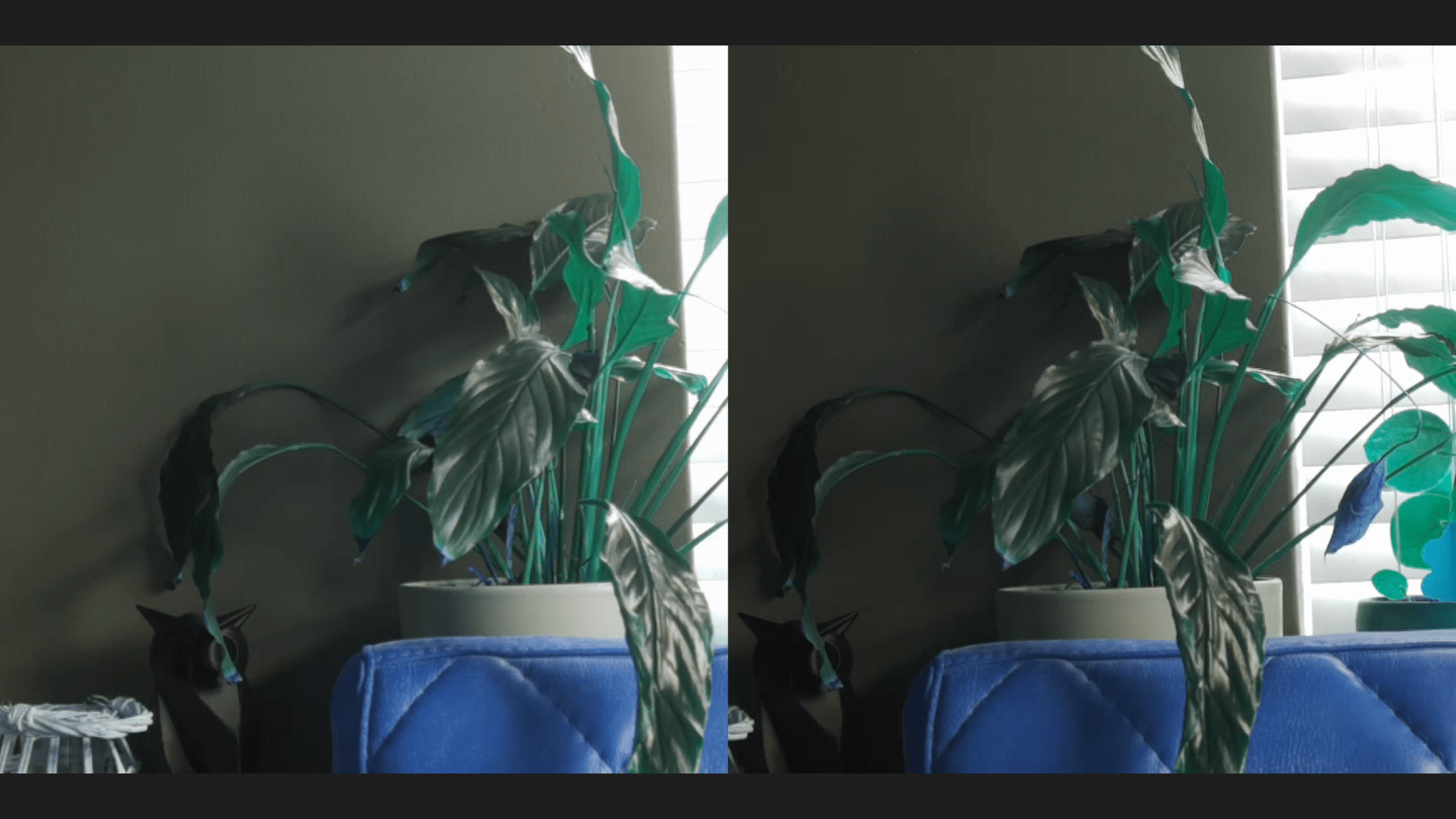
These are my experiments using python.
You can see that I had some trouble with projecting depth in some of these animations.
The sliders helped me to understand what was going on.
I’ve used some information from these books.
Code (much like my BBC Acorn Basic program)
import tkinter as tk
import math
def rotate(p, ax, ay):
x, y, z = p
# rotate around X
cy, sy = math.cos(ax), math.sin(ax)
y, z = y * cy - z * sy, y * sy + z * cy
# rotate around Y
cx, sx = math.cos(ay), math.sin(ay)
x, z = x * cx + z * sx, -x * sx + z * cx
return x, y, z
def project(p, blend):
x, y, z = p
# isometric
iso_x = x - z
iso_y = y + (x + z) * 0.5
# perspective
d = 4
f = d / (d + z)
per_x = x * f
per_y = y * f
# blend projections
px = iso_x * (1 - blend) + per_x * blend
py = iso_y * (1 - blend) + per_y * blend
return px, py
CUBE = [
(-1, -1, -1), (1, -1, -1), (1, 1, -1), (-1, 1, -1),
(-1, -1, 1), (1, -1, 1), (1, 1, 1), (-1, 1, 1)
]
EDGES = [
(0,1),(1,2),(2,3),(3,0),
(4,5),(5,6),(6,7),(7,4),
(0,4),(1,5),(2,6),(3,7)
]
root = tk.Tk()
root.title("Rotating Cube")
canvas = tk.Canvas(root, width=400, height=400, bg="black")
canvas.pack()
slider = tk.Scale(root, from_=0, to=1, resolution=0.01,
orient="horizontal", label="Isometric / Perspective")
slider.pack(fill="x")
ax = ay = 0
def draw():
global ax, ay
canvas.delete("all")
blend = slider.get()
points = []
for p in CUBE:
r = rotate(p, ax, ay)
x, y = project(r, blend)
points.append((200 + x * 80, 200 + y * 80))
for a, b in EDGES:
canvas.create_line(*points[a], *points[b], fill="white")
ax += 0.02
ay += 0.03
root.after(16, draw)
draw()
root.mainloop()