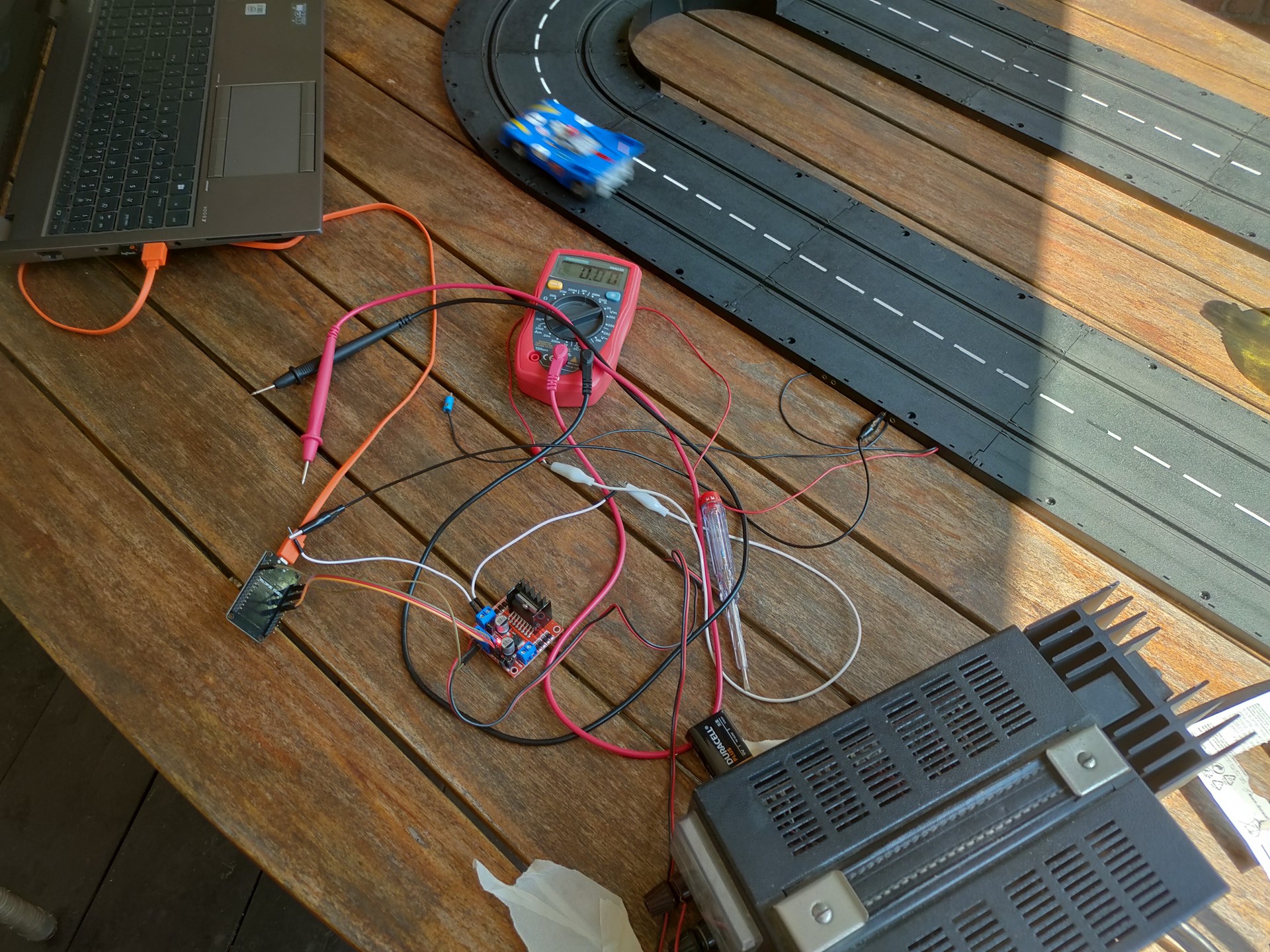
I got a vintage racetrack from a colleage a while back.
In the past i had some ideas controlling train or race tracks.
For train tracks i wanted to write intelligent maneuver software.
For a racetrack a web controllable race. Maybe with a webcam mounted on the car??
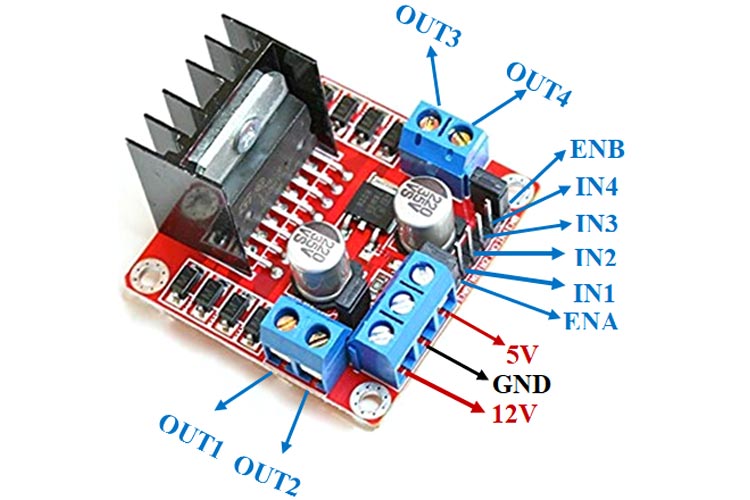
So i bought a little DC motor controller (2 channels) and took a esp32.
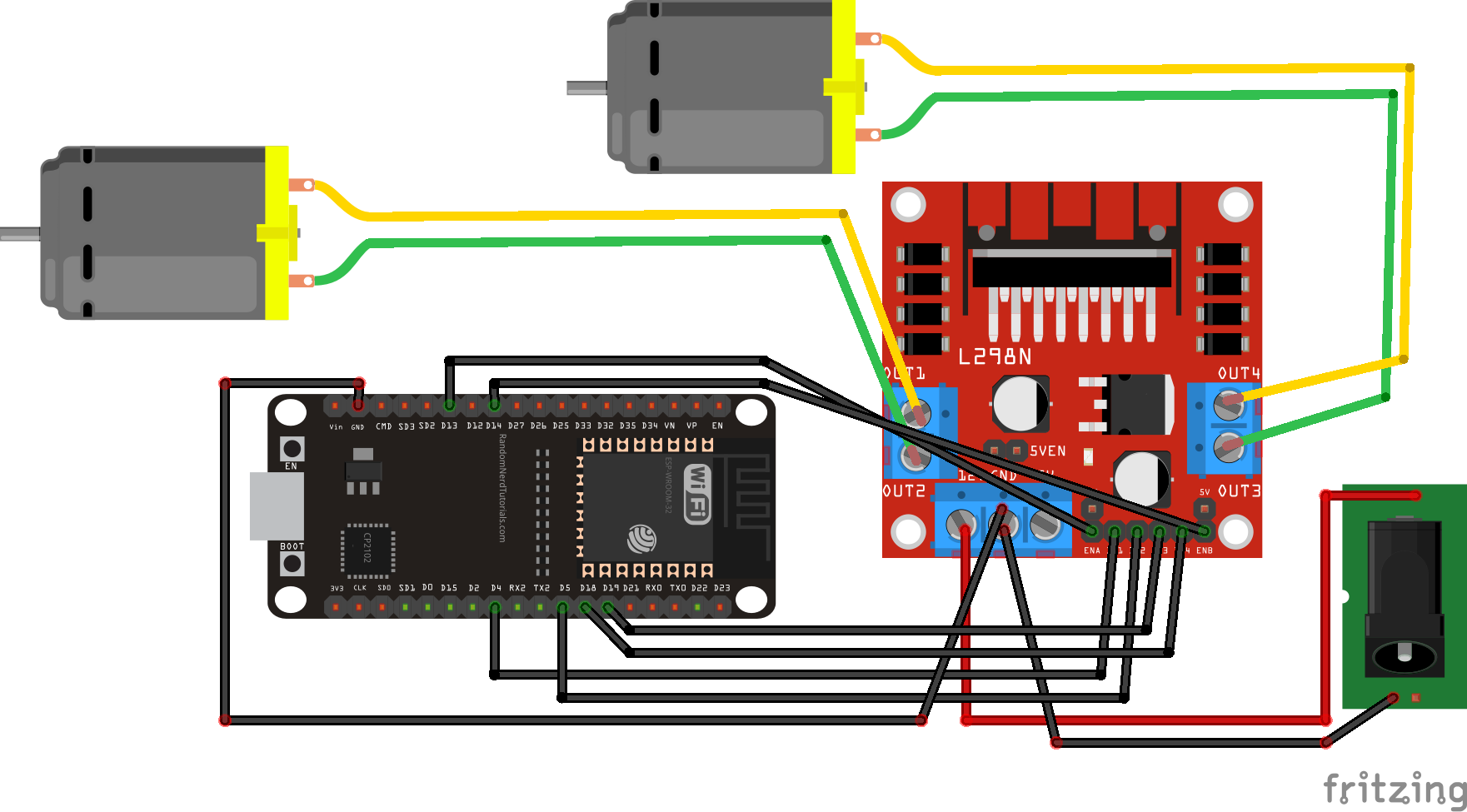
ESP:
GPIO04 Player1 IN1
GPIO05 Player1 IN2
GPIO19 Player2 IN1
GPIO18 Player2 IN2
GPIO13 PWM Player1
GPIO14 PWM Player2
The webinterface is behind a reverse proxy (apache)
TO BE POSTED .. arduino code
<VirtualHost *:443>
SSLEngine on
SSLProxyEngine On
SSLProtocol all -SSLv2 -SSLv3 +TLSv1
SSLCipherSuite ALL:!ADH:!EXPORT:!SSLv2:!RC4+RSA:+HIGH:+MEDIUM
SSLCertificateFile /etc/ssl/.......cer
SSLCertificateKeyFile /etc/ssl/private/........key
SSLCertificateChainFile /etc/ssl/private/GlobalSignRootCA.cer
SSLCertificateChainFile /etc/ssl/private/AlphaSSLCA-SHA256-G2.cer
CustomLog /var/log/httpd/media_ssl_request_log "%t %h %{SSL_PROTOCOL}x %{SSL_CIPHER}x \"%r\" %b"
ServerAdmin webmaster@henriaanstoot.nl
ServerName race.henriaanstoot.nl
ProxyRequests Off
ProxyPreserveHost On
SSLProxyVerify none
SSLProxyCheckPeerCN off
SSLProxyCheckPeerName off
<Location />
ProxyPass http://10.1.0.25/
ProxyPassReverse http://10.1.0.25/
</Location>
ErrorLog /var/log/httpd/race.henriaanstoot.nl-error.log
CustomLog /var/log/httpd/race.henriaanstoot.nl-access.log combined
</VirtualHost>