Last Updated or created 2023-03-14
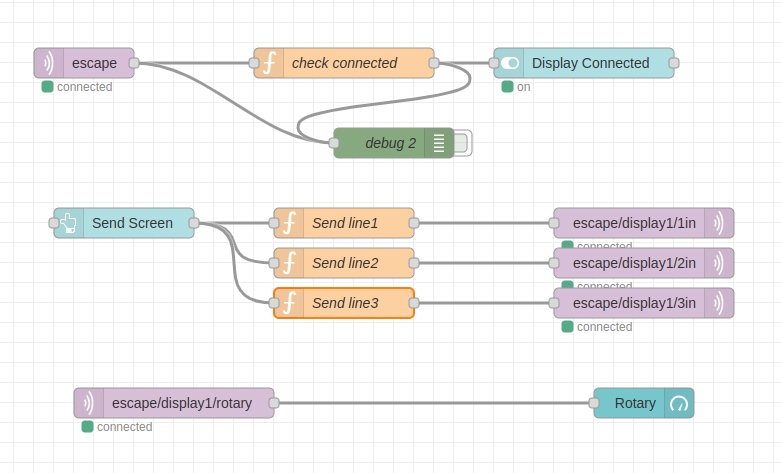
- Sends a “connected” to Mosquitto
- Mqtt controls Display
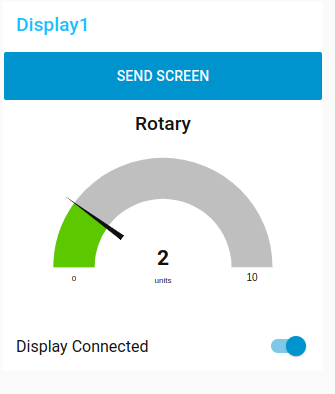
- Rotary values are displayed, a push on the rotary sends the value to Mosquitto
Code :
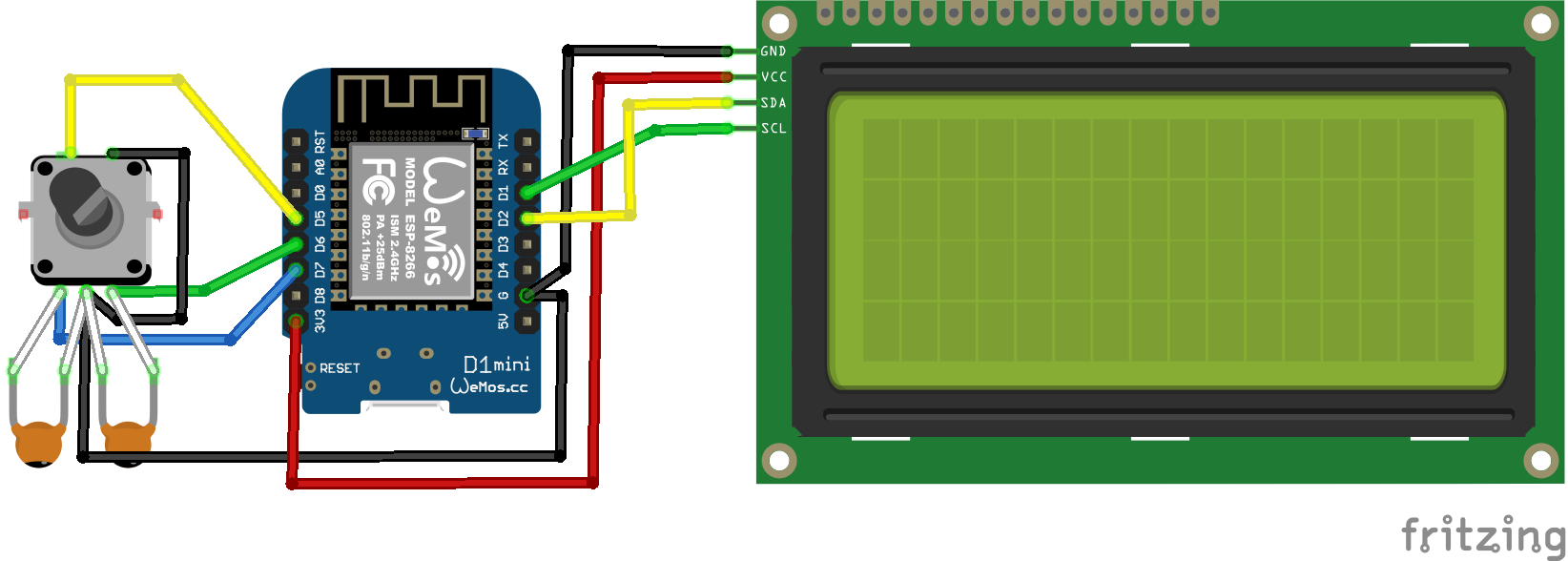
Notes: There is a problem with 4 line LCD using LiquidCrystal_I2C
Lines 3 and 4 will be shifted 4 characters to the right.
Workaround is: lcd.setCursor(-4, 2); // Go to column 0, row 3
#include <ESP8266WiFi.h>
#include <PubSubClient.h>
#include <WiFiClient.h>
#include "SoftwareSerial.h"
#include <Ethernet.h>
#include <Arduino.h>
#include <RotaryEncoder.h>
#define wifi_ssid "MYSSID"
#define wifi_password "MYSSIDPASS"
#define mqtt_server "MQTTSERVER"
#define mqtt_port 1883
WiFiClient espClient;
EthernetClient ethClient;
PubSubClient mqtt(espClient);
#include <Wire.h> // Include Wire library (required for I2C devices)
#include <LiquidCrystal_I2C.h> // Include LiquidCrystal_I2C library
LiquidCrystal_I2C lcd(0x27, 16, 4); // Configure LiquidCrystal_I2C library with 0x27 address, 16 columns and 4 rows
volatile bool flag = false;
#define PIN_IN1 D7
#define PIN_IN2 D6
#define push D5
int temp = 0;
RotaryEncoder *encoder = nullptr;
#if defined(ARDUINO_AVR_UNO) || defined(ARDUINO_AVR_NANO_EVERY)
// This interrupt routine will be called on any change of one of the input signals
void checkPosition()
{
encoder->tick(); // just call tick() to check the state.
}
#elif defined(ESP8266)
/**
* @brief The interrupt service routine will be called on any change of one of the input signals.
*/
IRAM_ATTR void checkPosition()
{
encoder->tick(); // just call tick() to check the state.
}
#endif
void scrollText(int row, String message, int delayTime, int lcdColumns) {
for (int i=0; i < lcdColumns; i++) {
message = " " + message;
}
message = message + " ";
for (int pos = 0; pos < message.length(); pos++) {
lcd.setCursor(0, row);
lcd.print(message.substring(pos, pos + lcdColumns));
delay(delayTime);
}
}
void setup_wifi() {
delay(10);
WiFi.mode(WIFI_STA);
WiFi.begin(wifi_ssid, wifi_password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
}
}
void setup() {
setup_wifi();
mqtt.setServer(mqtt_server, mqtt_port);
mqtt.setCallback(callback);
Serial.begin(115200);
Serial.println("initializing...");
WiFiClient espClient;
PubSubClient mqtt(espClient);
mqtt.setClient(espClient);
mqtt.setServer(mqtt_server, 1883);
mqtt.setCallback(callback);
mqtt.subscribe("escape/display1/#");
lcd.init(); // Initialize I2C LCD module
lcd.backlight(); // Turn backlight ON
lcd.setCursor(0, 0); // Go to column 0, row 0
lcd.print("Init");
lcd.setCursor(0, 1); // Go to column 0, row 1
lcd.print("Display #1");
encoder = new RotaryEncoder(PIN_IN1, PIN_IN2, RotaryEncoder::LatchMode::TWO03);
// register interrupt routine
attachInterrupt(digitalPinToInterrupt(PIN_IN1), checkPosition, CHANGE);
attachInterrupt(digitalPinToInterrupt(PIN_IN2), checkPosition, CHANGE);
pinMode(push, INPUT_PULLUP);
}
void reconnect() {
// Loop until we're reconnected
while (!mqtt.connected()) {
// Create a random client ID
String clientId = "ESP8266Client-";
clientId += String(random(0xffff), HEX);
// Attempt to connect
if (mqtt.connect(clientId.c_str())) {
// Once connected, publish an announcement...
mqtt.publish("escape", "display1 connected");
// ... and resubscribe
mqtt.subscribe("escape/display1/#");
} else {
// Wait 5 seconds before retrying
delay(5000);
}
}
}
void callback(char* topic, byte* payload, unsigned int length) {
payload[length]= '\0';
char * charPointer = (char *)payload;
String s="";
s =charPointer;
s = s + " ";
String topicStr = topic;
if (topicStr == "escape/display1/clear"){
lcd.clear();
}
if (topicStr == "escape/display1/1in"){
lcd.setCursor(0, 0); // Go to column 0, row 1
lcd.print(s.substring(0, 16));
}
if (topicStr == "escape/display1/2in"){
lcd.setCursor(0, 1); // Go to column 0, row 2
lcd.print(s.substring(0, 16));
}
if (topicStr == "escape/display1/3in"){
lcd.setCursor(-4, 2); // Go to column 0, row 3
lcd.print(s.substring(0, 16));
}
if (topicStr == "escape/display1/4in"){
lcd.setCursor(-4, 3); // Go to column 0, row 4
lcd.print(s.substring(0, 16));
}
}
void loop() {
if (!mqtt.connected()) {
reconnect();
}
mqtt.loop();
static int pos = 0;
encoder->tick(); // just call tick() to check the state.
int newPos = encoder->getPosition() / 2;
if (pos != newPos) {
String nr="";
Serial.print("pos:");
Serial.print(newPos);
Serial.print(" dir:");
Serial.println((int)(encoder->getDirection()));
pos = newPos;
// hier nog iets mee doen
// zonder setPos moet je eerst lang clockwise voordat weer gaat tellen
// met setPos blijft 0
// if (pos < 0){
// pos = 0;
// encoder->setPosition(0);
// }
nr = pos + " ";
lcd.setCursor(10, 3); // Go to column 10, row 3
lcd.print(pos);
lcd.print(" ");
}
temp = digitalRead(push);
if (temp == LOW) {
char msg_out[20];
sprintf(msg_out, "%d",pos);
mqtt.publish("escape/display1/rotary", msg_out);
}
}