Last Updated or created 2024-08-19
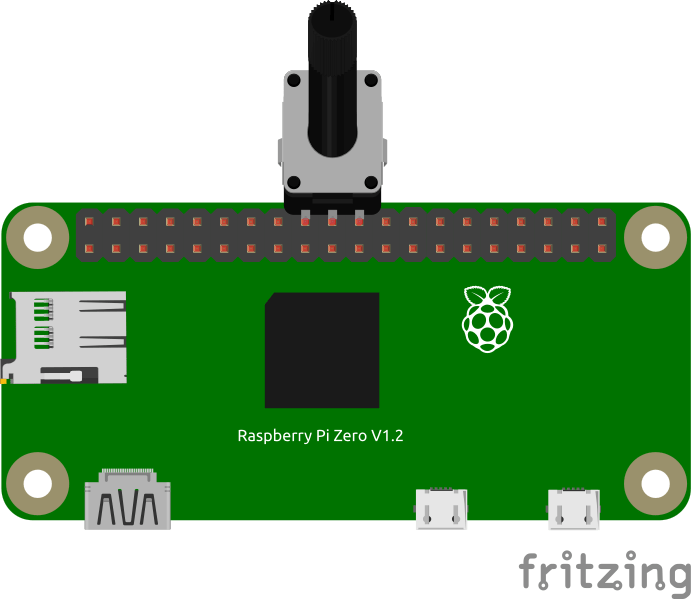
I’ve connected the rotary encoder directly to the zero.
Although many websites state that you need pull-up resistors, there is no need. Just use the internal pull-up resistors in the Pi.
Example code
GPIO.setmode(GPIO.BCM) # Use BCM mode
GPIO.setup(self.24, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(self.25, GPIO.IN, pull_up_down=GPIO.PUD_UP)
NOTE: Between 24 and 25 is a GND connection
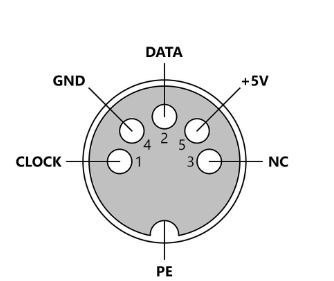
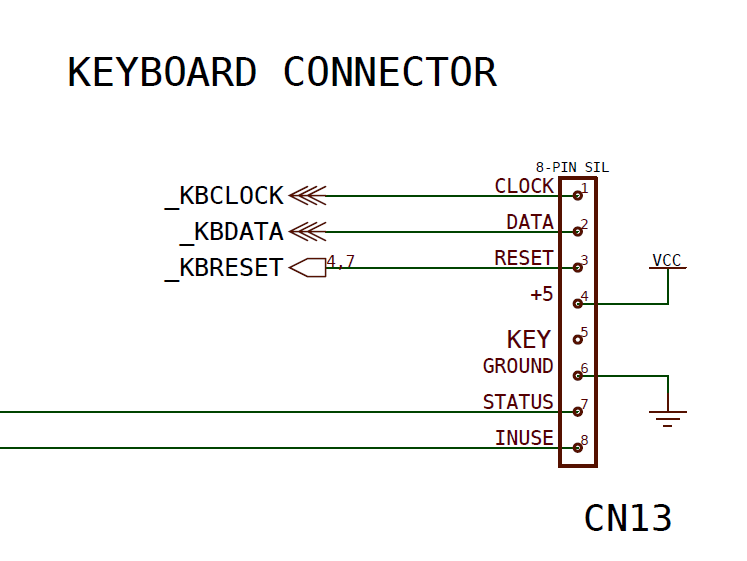
Besides USB HID below XT, C64 and Amiga connectors will be emulated