I did this a few times before, but I forgot.
Doing it again. Smoke wood and a container and booze.
I did this a few times before, but I forgot.
Doing it again. Smoke wood and a container and booze.
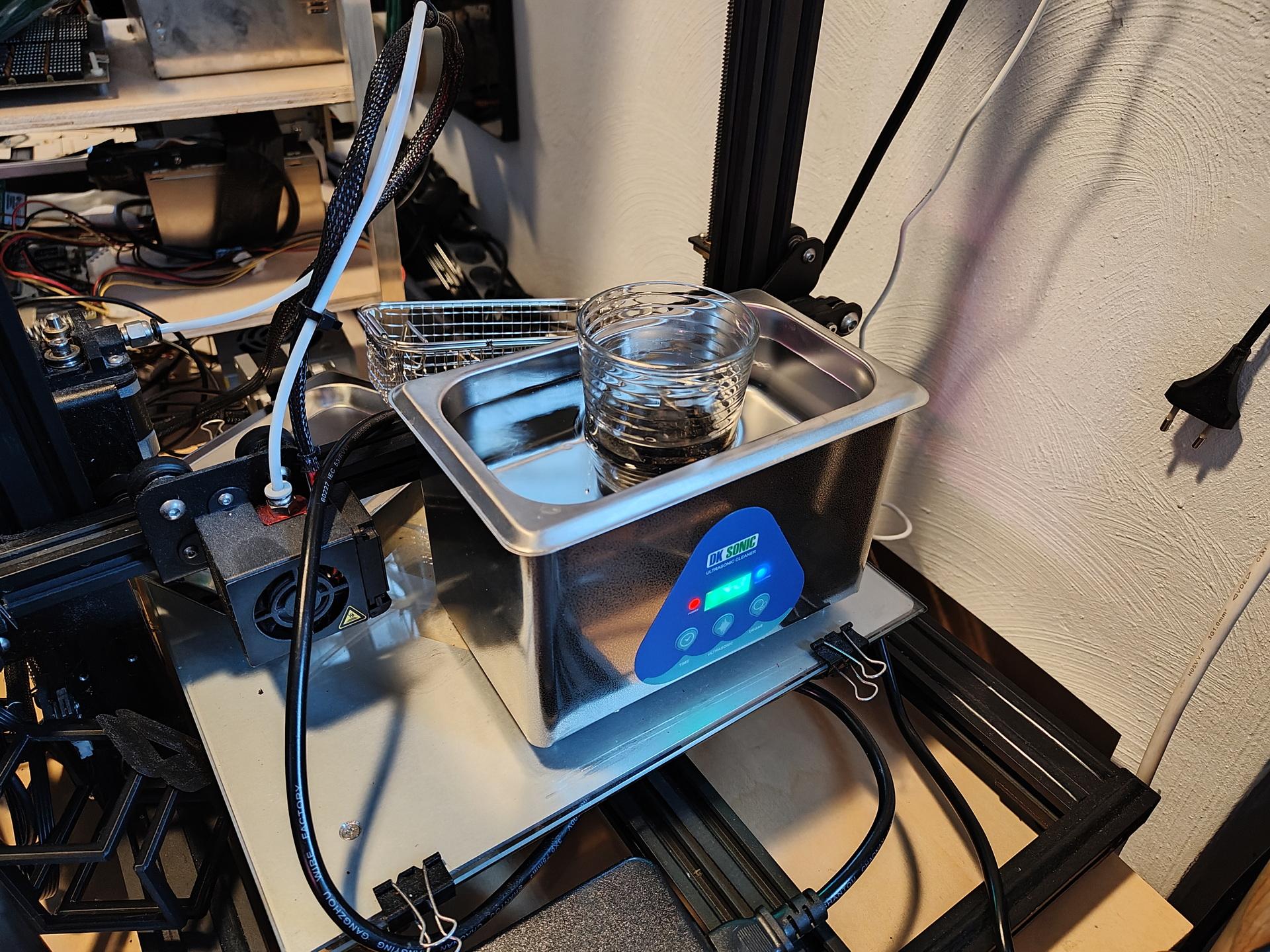
While doing other stuff, I experimented with fake barrel ageing booze using my ultrasonic cleaner.
Using this method, you can give a barrel/wood taste to your liquids.
I used a Whisky barrel piece to give a nicer/better taste to generic Vodka.
Next to do, other woods and spirits. Like Cognac woodbarrel and plain white Rum.
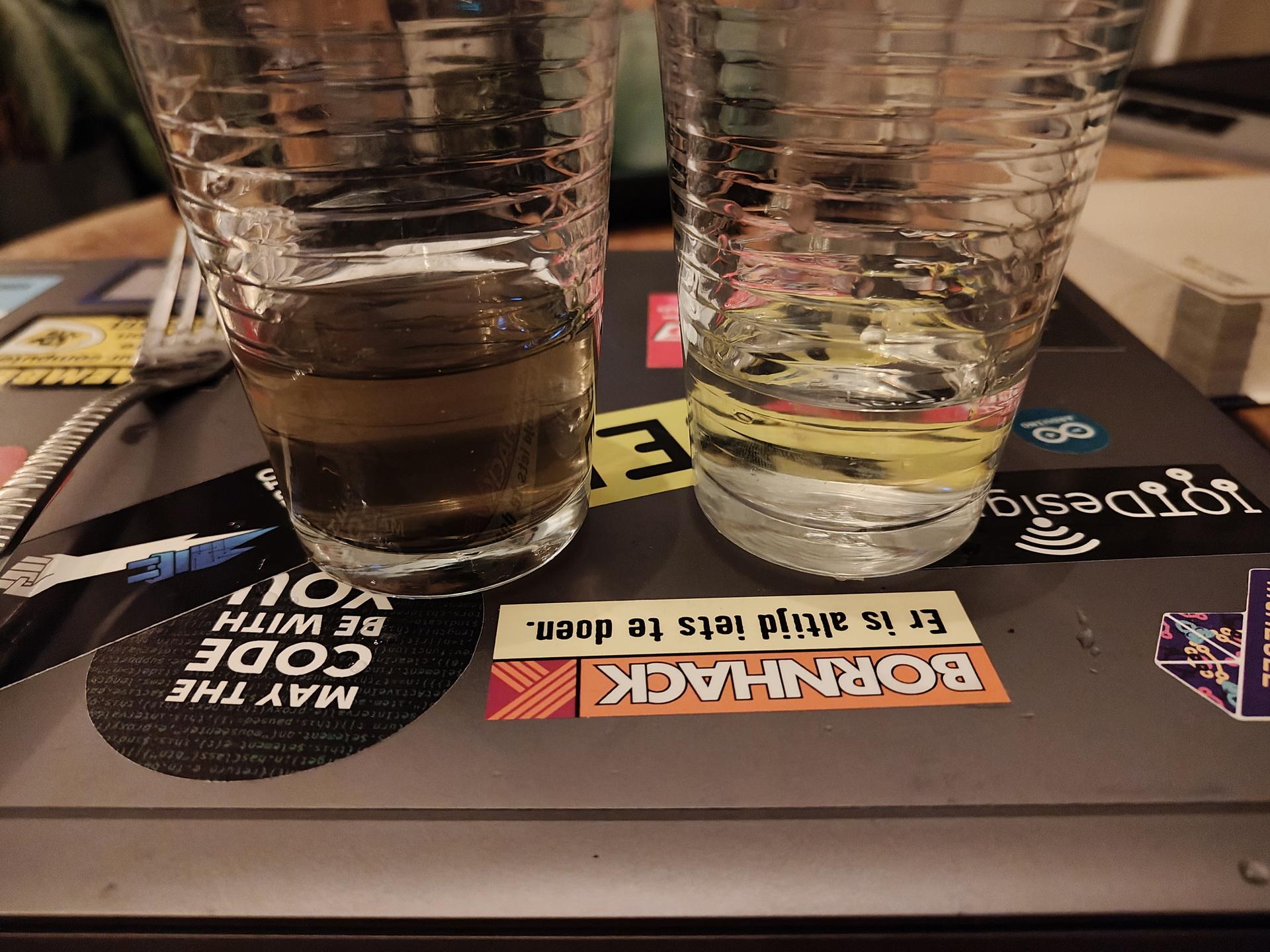
Look at the colour change!
It smelled better, and the taste was great.
Smooth, round and far less harsh as the plain Vodka.
Or anything else. ( idea from a reddit post )
UPDATE: 20250523
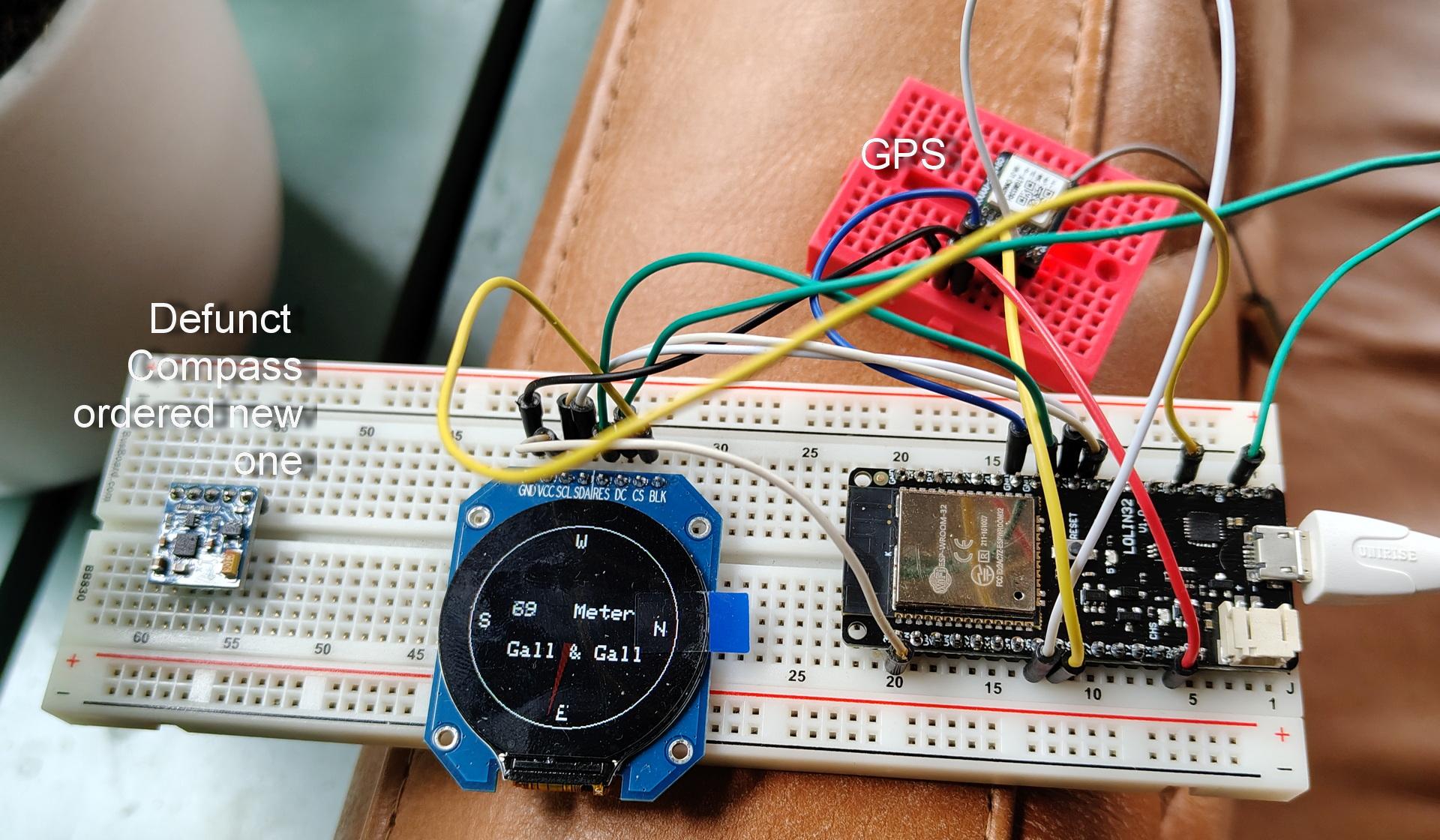
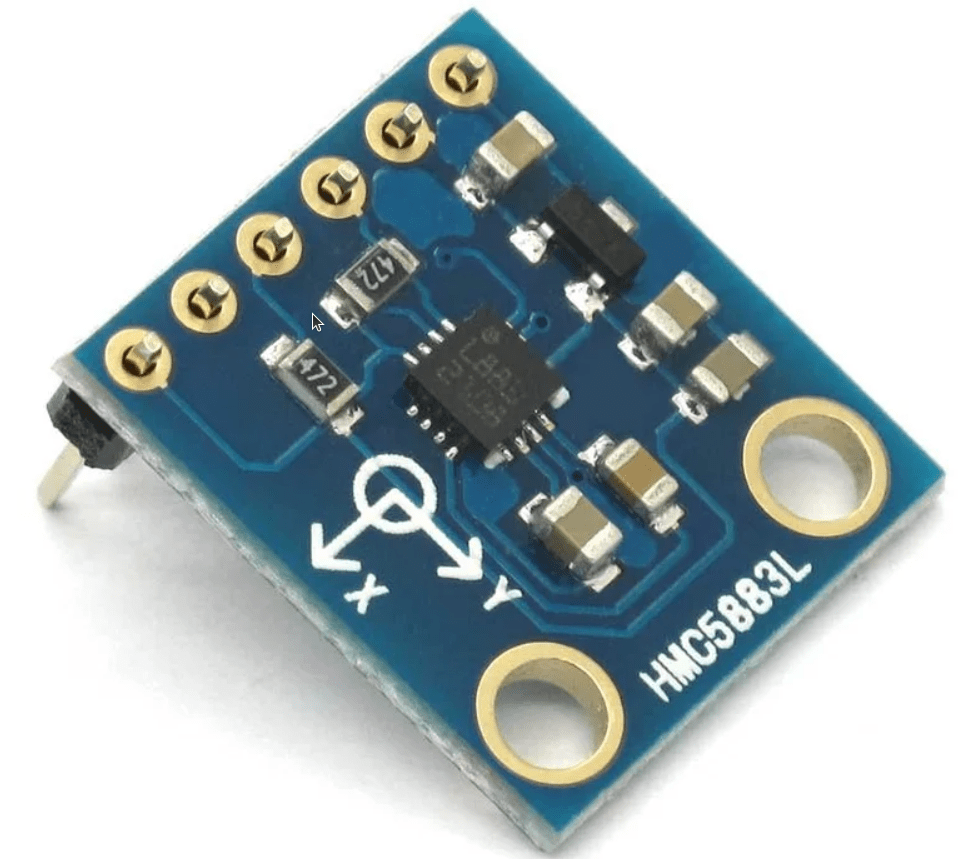
Combining a GPS module, compass, a LED ring and some code, I want to make a little device which shows you the way to the nearest … something.
To make it completely standalone, I have to use a SIM module. (Same as I have used before) This POC will use my phone as hotspot.
The LED ring will show the direction to go.
Edit: Maybe not a LED ring but a little display.

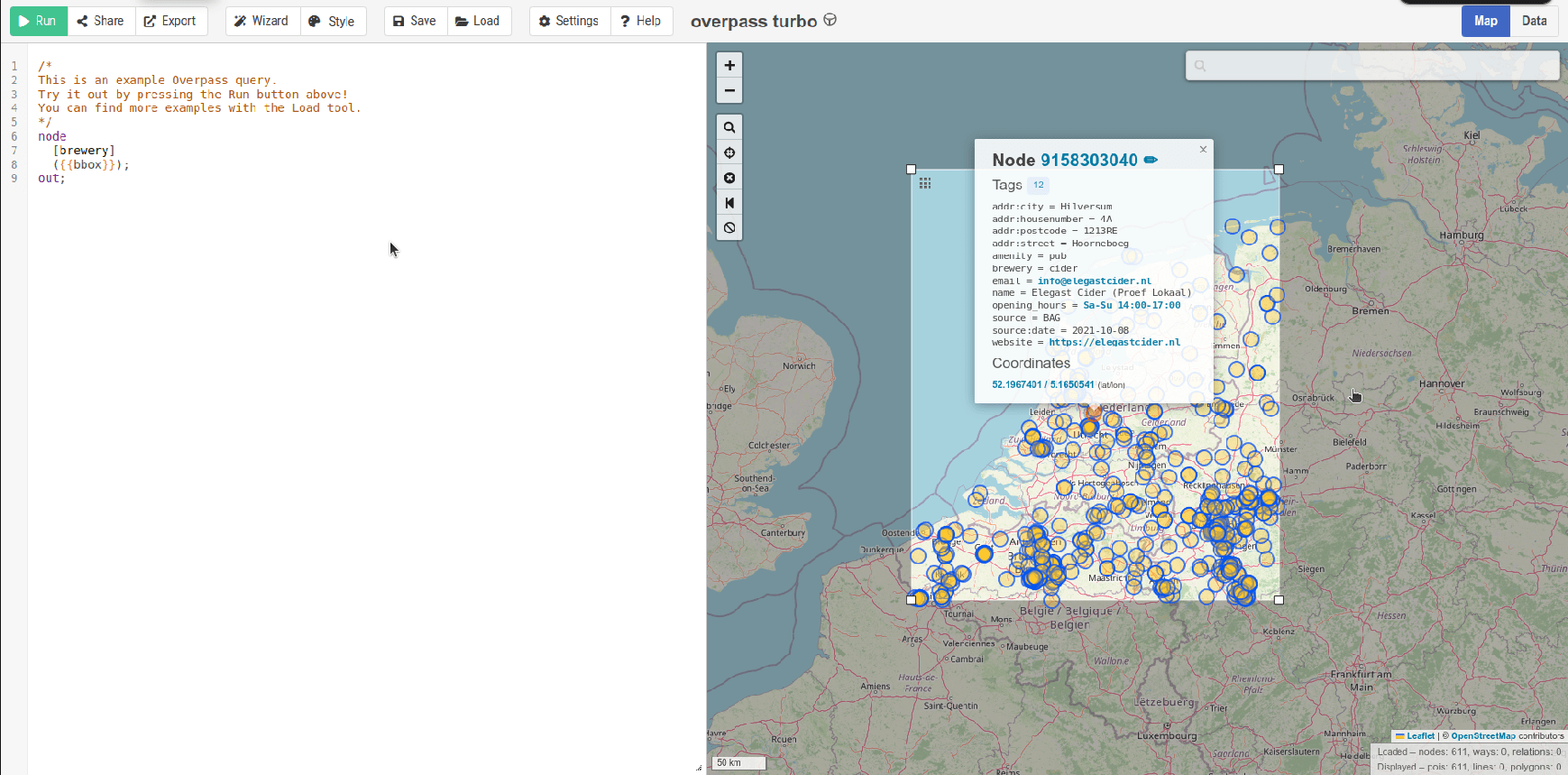
As previously posted, I was playing with Overpass turbo.
Using an API, I can use code to query this.
Test code for my web server to query the data
import overpy
import math
api = overpy.Overpass()
# This location will be filled with data from GPS module on Arduino.
latitude = 52.2270745 # Center latitude (e.g. Berlin)
longitude = 5.177519 # Center longitude
box_size = 0.05 # Box size in degrees (about ~5 km)
south = latitude - box_size
north = latitude + box_size
west = longitude - box_size
east = longitude + box_size
def haversine(lat1, lon1, lat2, lon2):
R = 6371 # Earth radius in km
phi1 = math.radians(lat1)
phi2 = math.radians(lat2)
d_phi = math.radians(lat2 - lat1)
d_lambda = math.radians(lon2 - lon1)
a = math.sin(d_phi / 2)**2 + math.cos(phi1) * math.cos(phi2) * math.sin(d_lambda / 2)**2
c = 2 * math.atan2(math.sqrt(a), math.sqrt(1 - a))
return R * c # Distance in kilometers
# Calculate bearing in degrees (0-360)
def bearing(lat1, lon1, lat2, lon2):
phi1 = math.radians(lat1)
phi2 = math.radians(lat2)
delta_lon = math.radians(lon2 - lon1)
x = math.sin(delta_lon) * math.cos(phi2)
y = math.cos(phi1) * math.sin(phi2) - math.sin(phi1) * math.cos(phi2) * math.cos(delta_lon)
initial_bearing = math.atan2(x, y)
compass_bearing = (math.degrees(initial_bearing) + 360) % 360 # Normalize to 0–360
return compass_bearing
# Overpass QL query
query = f"""
[out:json];
node
["shop"="alcohol"]
({south}, {west}, {north}, {east});
out body;
>;
out skel qt;
"""
try:
result = api.query(query)
# Collect and sort places by distance
places = []
for node in result.nodes:
node_lat = float(node.lat)
node_lon = float(node.lon)
distance = haversine(latitude, longitude, node_lat, node_lon)
direction = bearing(latitude, longitude, node_lat, node_lon)
name = node.tags.get("name", "Unnamed")
places.append((distance, direction, name, node_lat, node_lon))
places.sort()
print(f"Found {len(places)} alcohol-related places sorted by distance:")
for dist, dir_deg, name, lat, lon in places:
print(f"- {name} at ({lat:.5f}, {lon:.5f}) — {dist:.2f} km, {dir_deg:.0f}°")
except Exception as e:
print(f"Error: {e}")
Output:
Found 10 alcohol-related places sorted by distance:
- The Skiff at (52.22583, 5.17860) — 0.16 km, 152°
- Onzewijnen at (52.22612, 5.17045) — 0.49 km, 258°
- Gall & Gall at (52.23244, 5.19204) — 1.15 km, 59°
- Gall & Gall at (52.21536, 5.16735) — 1.48 km, 208°
- Eric's Beer Craft at (52.21549, 5.16632) — 1.50 km, 211°
- Slijterij at (52.21082, 5.15692) — 2.29 km, 218°
- Gall & Gall at (52.21590, 5.14074) — 2.80 km, 244°
- Gall & Gall at (52.25422, 5.22705) — 4.53 km, 48°
- Gall & Gall at (52.26808, 5.18348) — 4.58 km, 5°
- Il DiVino at (52.27507, 5.16414) — 5.41 km, 350°
Example using Overpass Turbo to find breweries
Other ideas
UPDATE
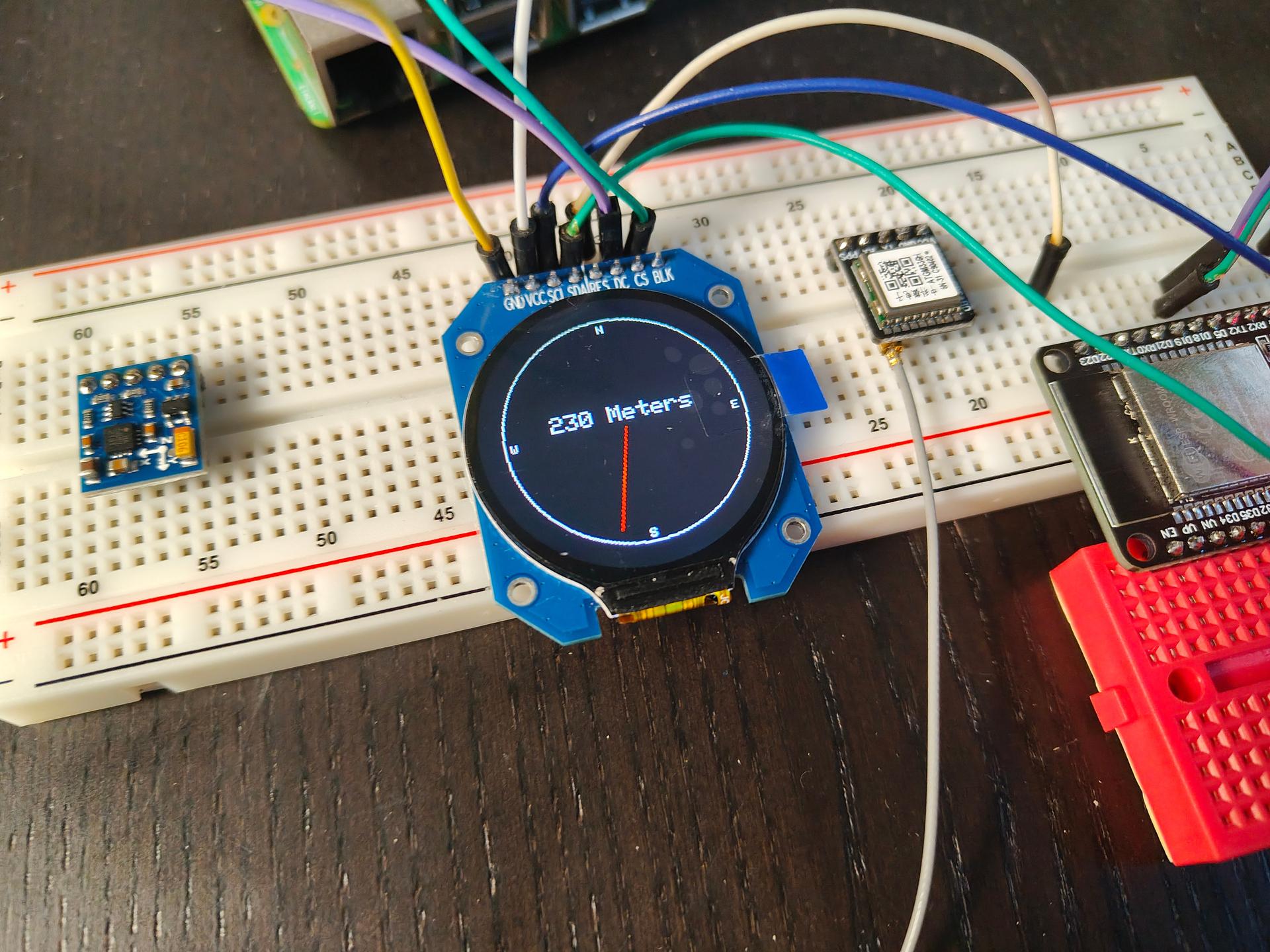
Building the hardware : First design

Some test code
#include "SPI.h"
#include "Adafruit_GFX.h"
#include "Adafruit_GC9A01A.h"
// Overrule stuff
#define TFT_CS 18 // Chip select
#define TFT_DC 5 // Data/command mode
#define TFT_BL 4 // Backlight control
#define TFT_MOSI 12 // SPI Out AKA SDA
#define TFT_SCLK 13 // Clock out AKA SCL
#define TFT_MISO -1 // pin not used
#define TFT_RST 23 // Reset ################# IMPORTANT, won't work without!! Took me a hour!
// Need this changed from example also
Adafruit_GC9A01A tft(TFT_CS, TFT_DC,TFT_MOSI,TFT_SCLK,TFT_RST,TFT_MISO);
float angle = 0;
void setup() {
tft.begin();
tft.setRotation(0);
tft.fillScreen(GC9A01A_BLACK);
drawCompassFace();
}
void loop() {
drawNeedle(angle, GC9A01A_RED);
delay(1000);
drawNeedle(angle, GC9A01A_BLACK); // Erase previous needle
angle += 15;
if (angle >= 360) angle = 0;
tft.setCursor(60, 100);
tft.setTextColor(GC9A01A_WHITE); tft.setTextSize(2);
tft.println("230 Meters");
}
// Draw static compass face
void drawCompassFace() {
int cx = tft.width() / 2;
int cy = tft.height() / 2;
int radius = 100;
tft.drawCircle(cx, cy, radius, GC9A01A_WHITE);
tft.setTextColor(GC9A01A_WHITE);
tft.setTextSize(1);
tft.setCursor(cx - 3, cy - radius + 5); tft.print("N");
tft.setCursor(cx - 3, cy + radius - 10); tft.print("S");
tft.setCursor(cx - radius + 5, cy - 3); tft.print("W");
tft.setCursor(cx + radius - 10, cy - 3); tft.print("E");
}
// Draw compass needle
void drawNeedle(float angleDeg, uint16_t color) {
int cx = tft.width() / 2;
int cy = tft.height() / 2;
float angleRad = angleDeg * DEG_TO_RAD;
int x = cx + cos(angleRad) * 90;
int y = cy + sin(angleRad) * 90;
tft.drawLine(cx, cy, x, y, color);
}
Going with my friend Vincent to the Whisky Festival, with some of his friends.
Missing the train, buying whisky coins every half hours, some beers afterwards. Fun times.
Bought some cigars accompanying the whiskies.
Seen Wullie Macmorland walking around.
I’ve played pipes in his restaurant several times in the 90’s
Last time I’ve seen him is 10+ years ago, with a great story.
When I walked into his restaurant, he remembered me. And my love for whisky.
Before I could sit down, he called me to his bar.
“I have a whisky you have to try!” He said.
Sneaky with the bottle below the counter, he poured me a “whisky”.
It was disgusting !
I said, “THAT’s not whisky!”
“Yes it is!” he smiled. Safari whisky!
He was laughing at my disgusted face.
“Someone gave it to me, it’s everything but whisky.”
It’s even bad for lamp oil! LOL







Jup, I am a fan of smoky whiskies.
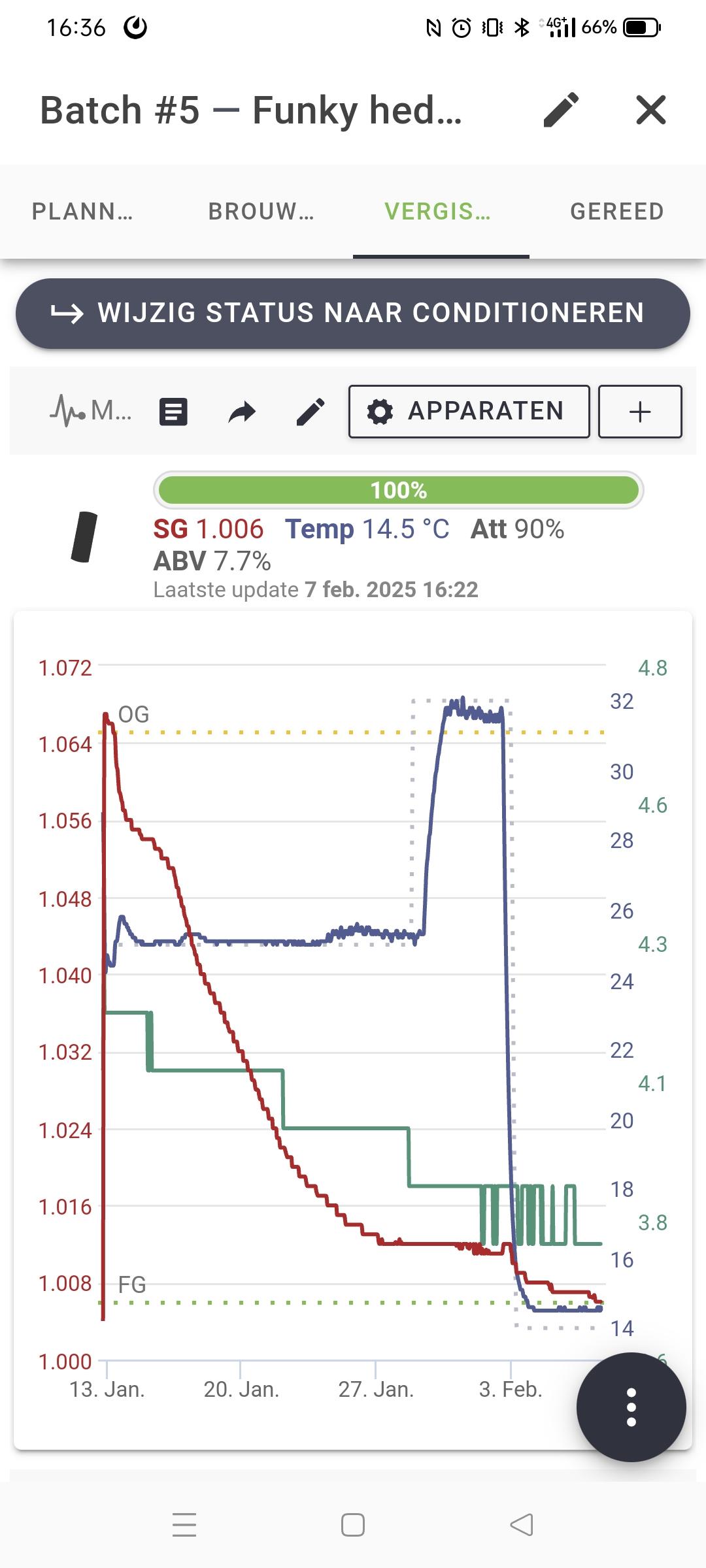
UPDATE:
20250312 – Liquid BBQ smoke whisky delivered ..

Next step sedimentation
Not my model, but I altered the graphics, and sizes.
See https://www.thingiverse.com/thing:23817
Very cool, you can use openscad to edit the model.
(See previous posts why I am a fan!)
Badly coloured with permanent marker.
I really need a printer like my friend Duncan!

Let watch some opera .. The Magic Flute (Die Zauberflöte) by Mozart.
Written in 1791, 225 pages!
This is more fun with the “Partitura”
Last saturday we were brewing beer, ending up with a lot of spent grain. (Bier borstel in Dutch)
These are the processed grains from the brewing.


Well, let’s bake a delicious bread, very tasty with, for example, salted butter.
Preparation time : 135 minutes
Baking time : 60 minutes
What do you need
225 grams of spent grain from the brewing
400 grams of flour
200 ml beer ( I use Leffe Blond)
7 grams of baker’s yeast
50ml olive oil
Put the brewer’s grains in the food processor. (Removes the sharp edges of the malt.)
Put the yeast and a little sugar in the beer. This causes the yeast to become active.
Knead all ingredients together until it becomes an airy ball.
Then let this dough rise for an hour and a half in a warm place in a bowl that is covered with plastic.
Then knead the dough briefly and let it rest for another half hour.
Preheat the oven to 200º C.
Pour the batter into a greased baking pan.
Then place the dough in the center of the oven.
After about an hour the bread should be ready. You can check this by knocking on the bread. If it sounds hollow, the bread is ready.

We have been to Limburg for a few days. Visiting the Kasematten, La Trappe brewery, Fortifications in and around Maastricht, Thermenmuseum, Castles and more.
(We even slept in a Castle and a Castlegate)
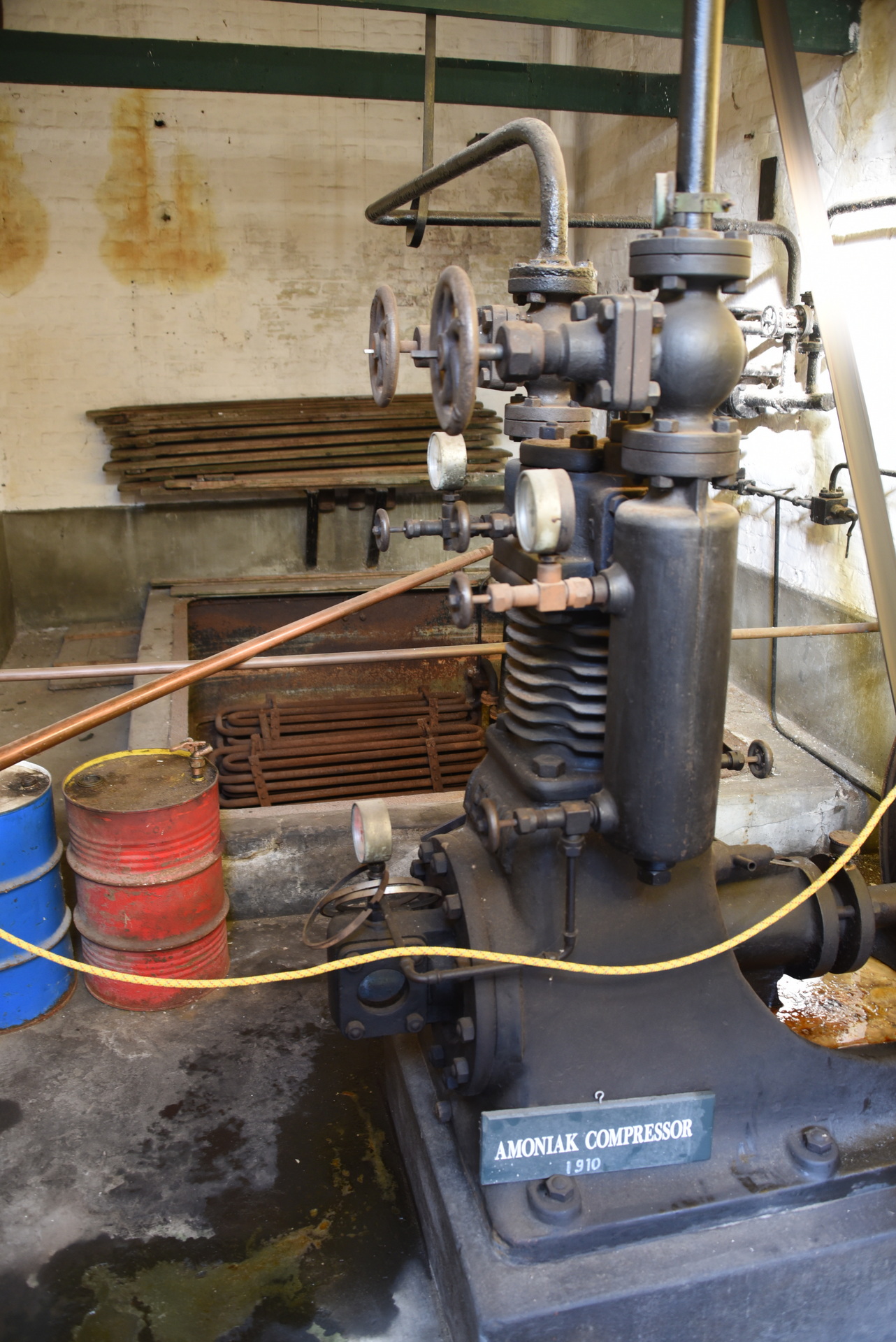
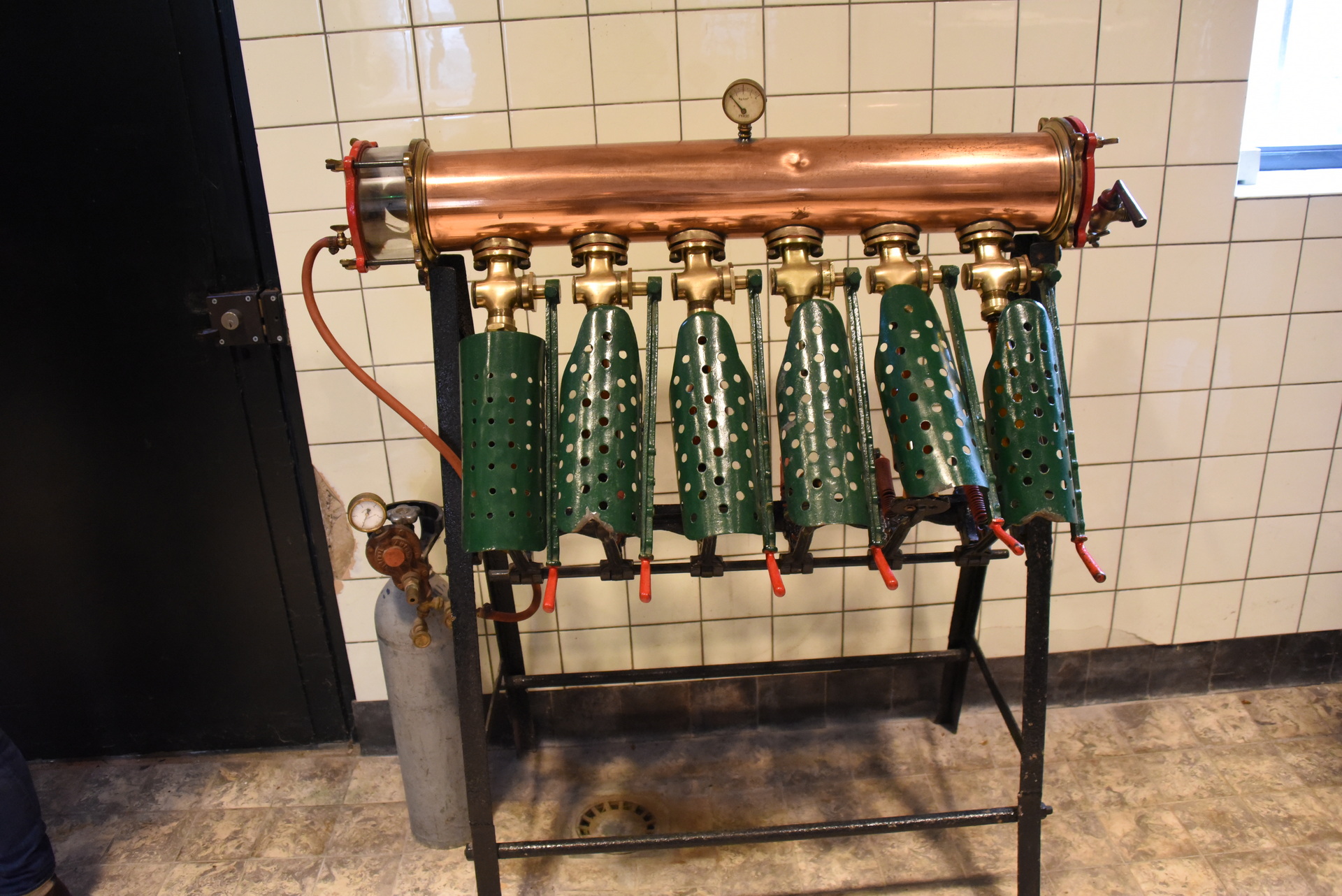
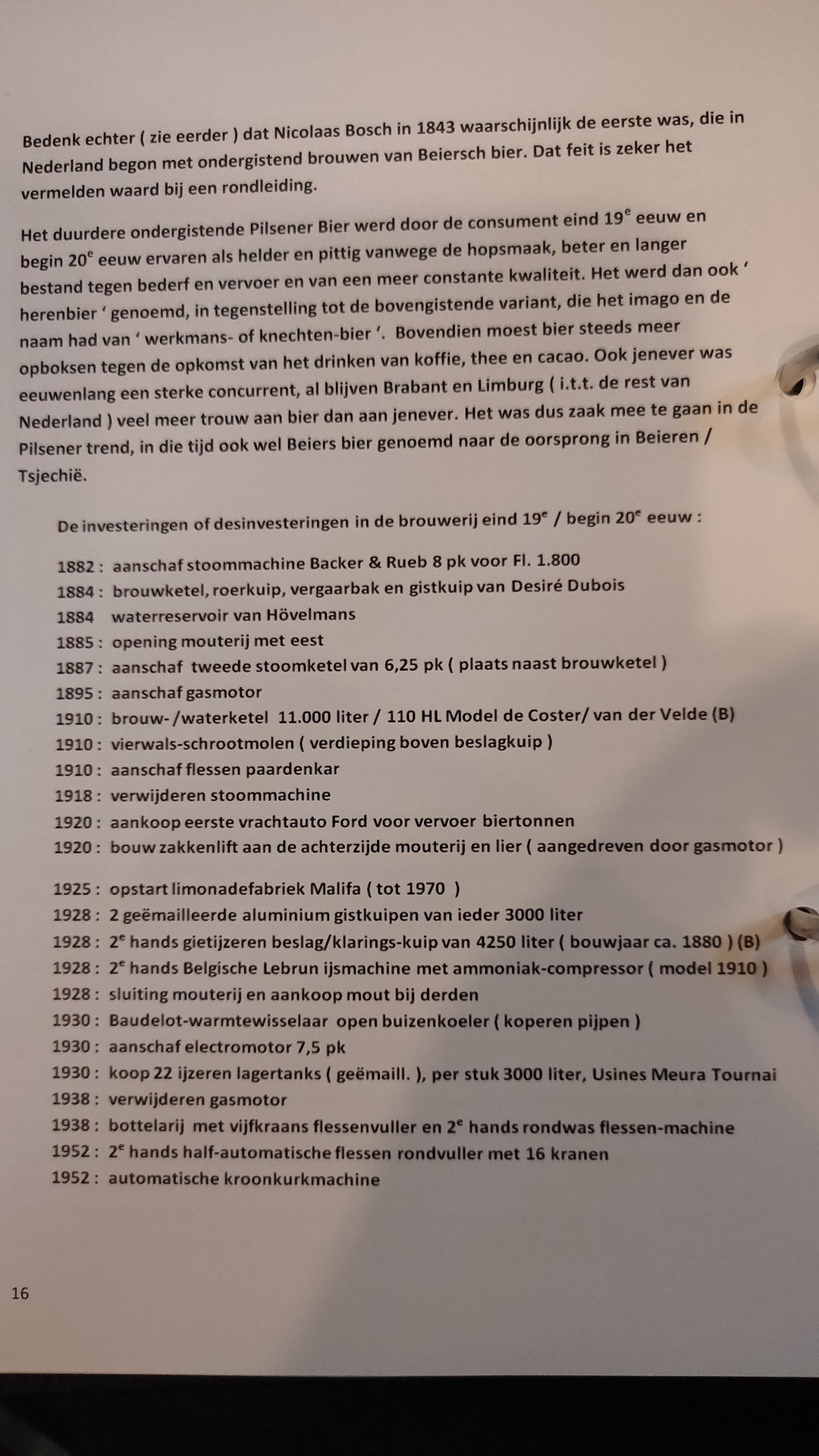
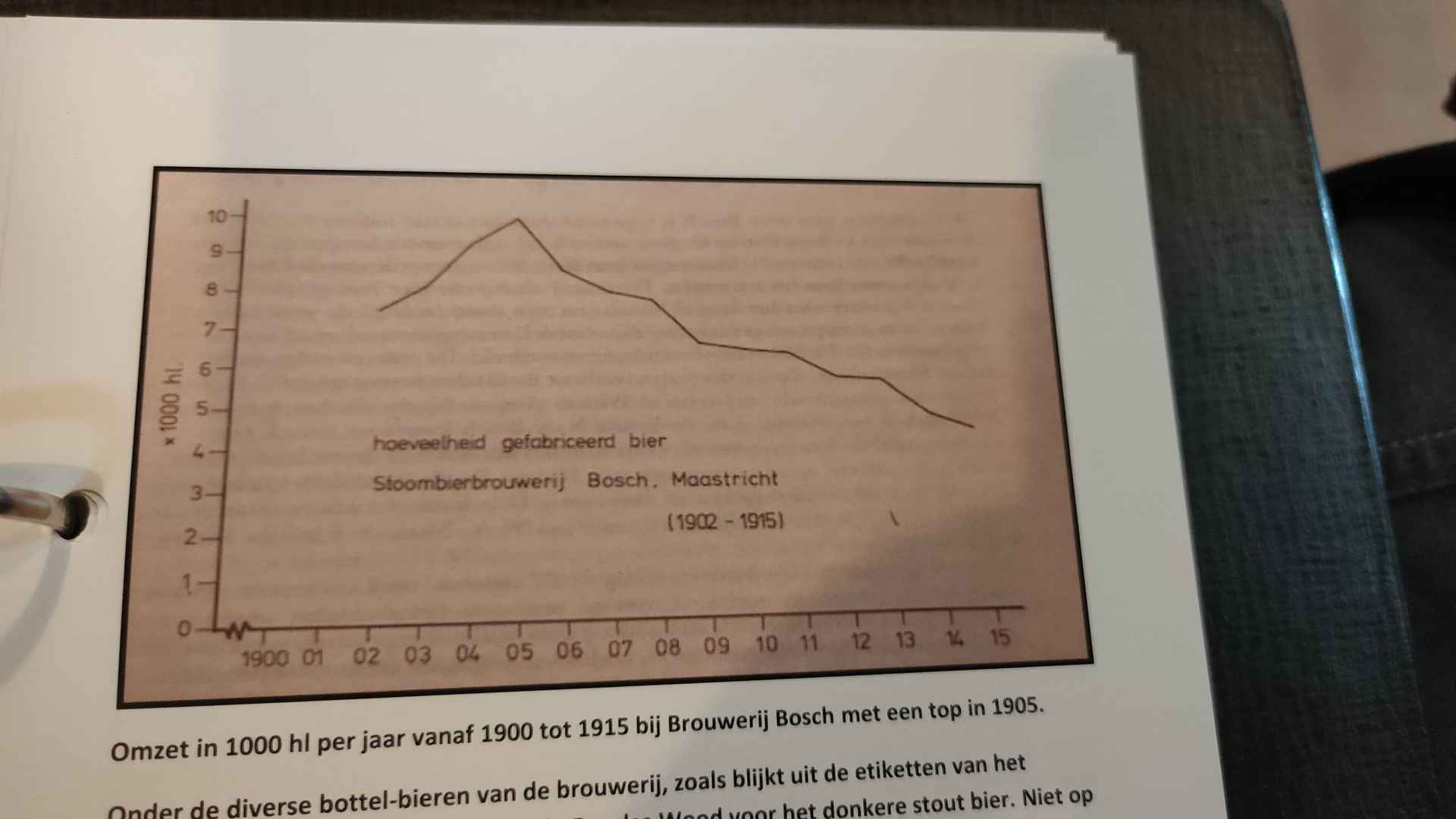
We also visited brewery Bosch, a brewery where time has stood still since the 70’s (Many tools are even from the 1920’s.)
Well worth a visit!
https://www.brouwerijbosch.nl/en

































I love making cocktails for the ladies. Its cold outside, so here is my take on the Chocolate Amnesia Cocktail.
(Some make this with ice, this is a heated version)
Mix and heat in a (sauce) pan .. enjoy
