Added: ino file 20220525
Bought a cheap table lamp a few weeks ago.
Runs on batteries and when you flip it over, it turns on or off.
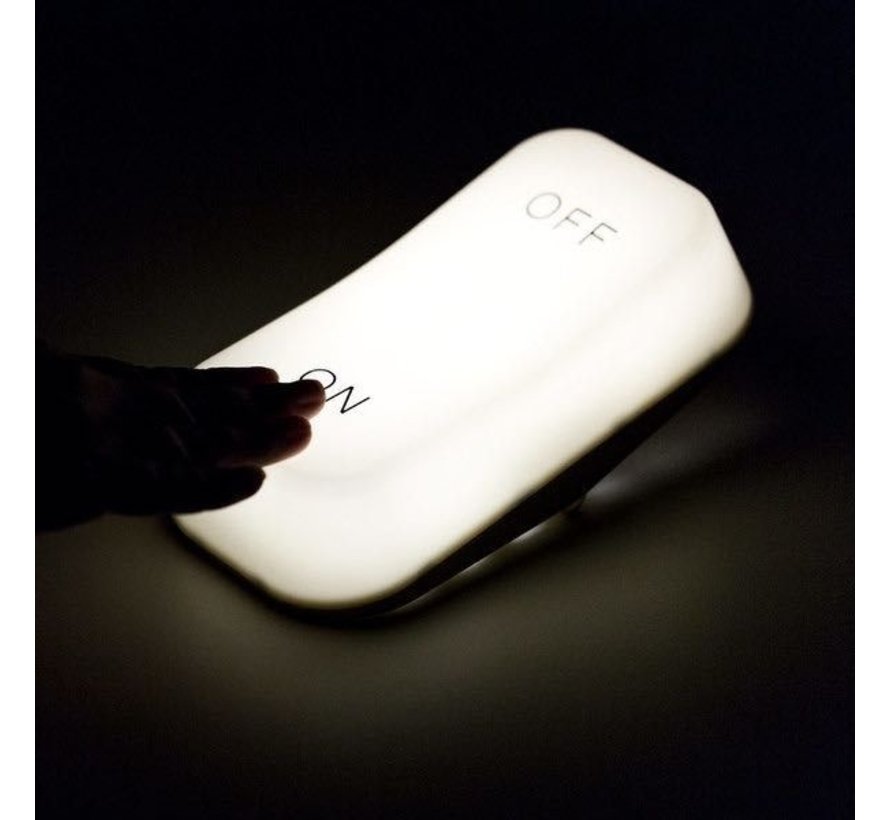
I thought, when i strip this thing of its internals. I can make a wifi/mqtt enabled one.
Opening it up today, i saw a minimalistic print and a battery holder. There was a tilt switch like

Which i wanted to replace by a mercury one i bought in a bunch of sensors a few years ago.

So why go though all the trouble stripping and replacing .. so i didnt
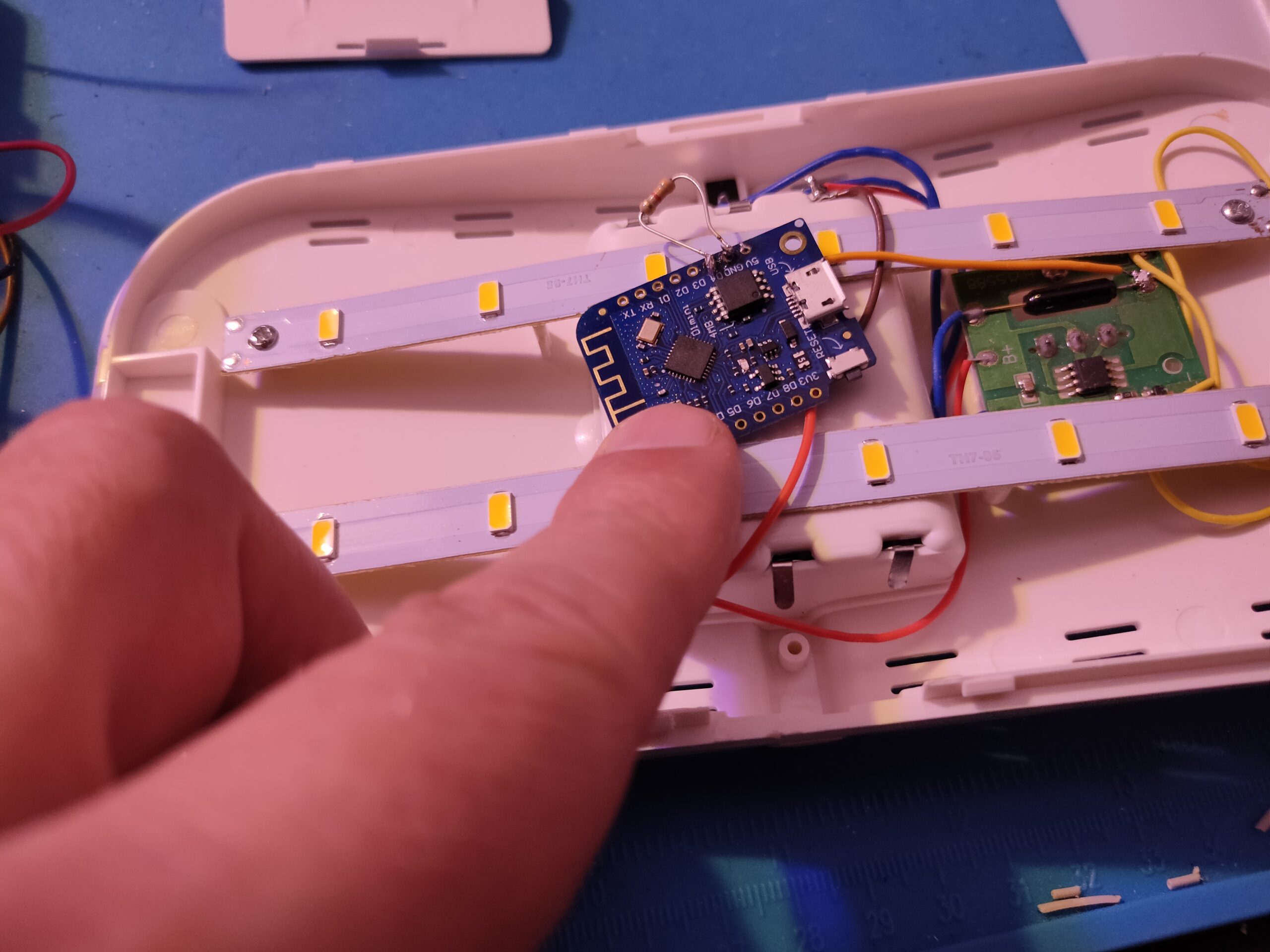
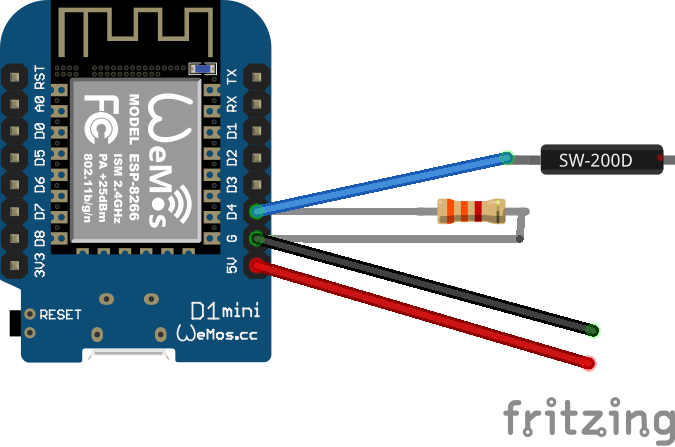
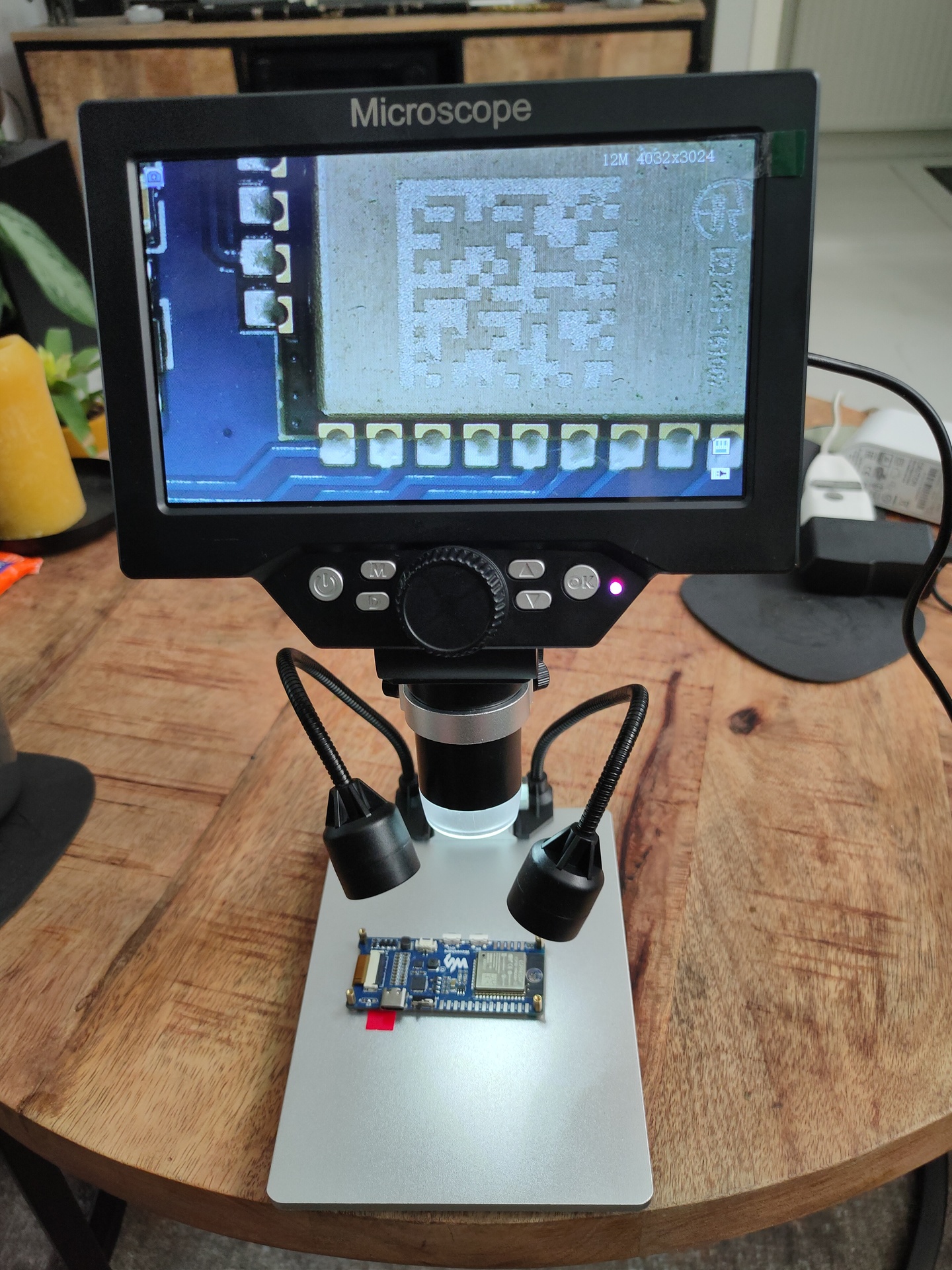
GND and 5v to the batteries, and D4 to the tilt switch. (Measure which side you have to take!) .. I used a pull down of 3k3 ohms
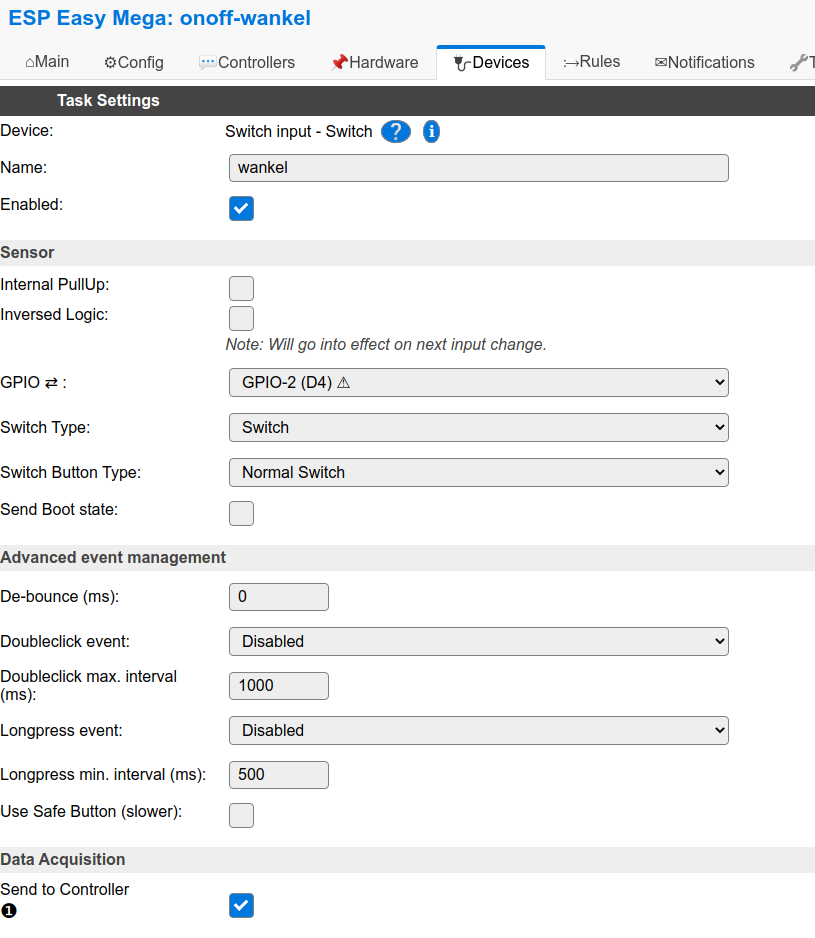
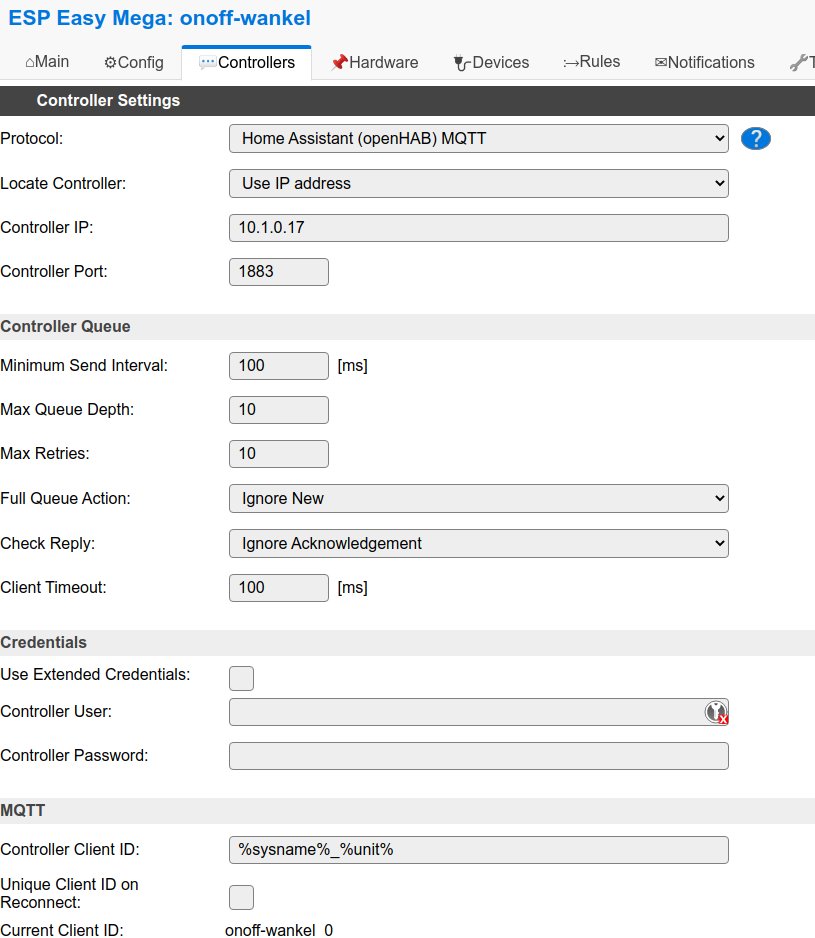
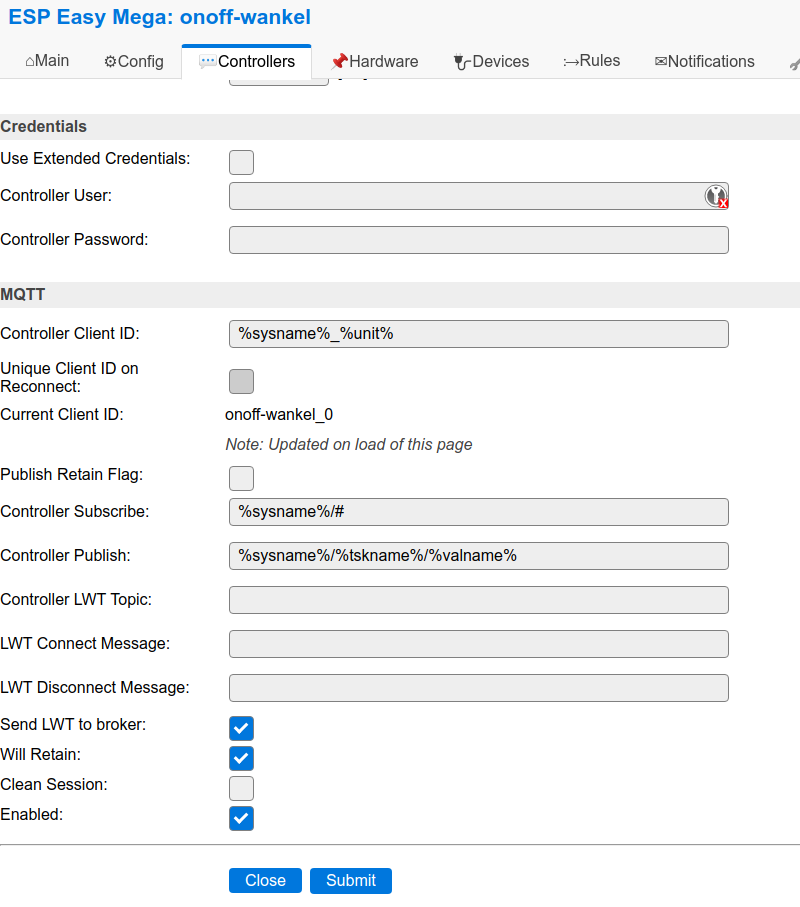
Esp was flashed in the past with Easy ESP .. well lets keep that one for now.
INO version
#include <ESP8266WiFi.h>
#include <PubSubClient.h>
#include <Wire.h>
#include <Ethernet.h>
const char* ssid = "SSID";
const char* password = "PASSWORD";
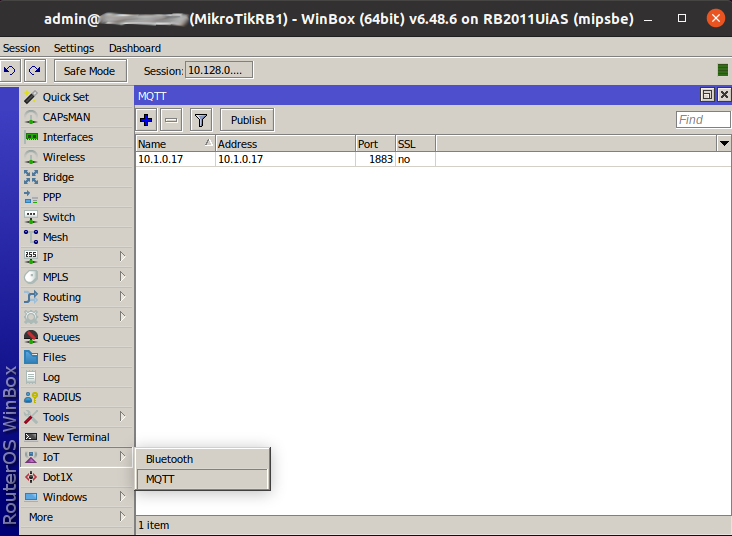
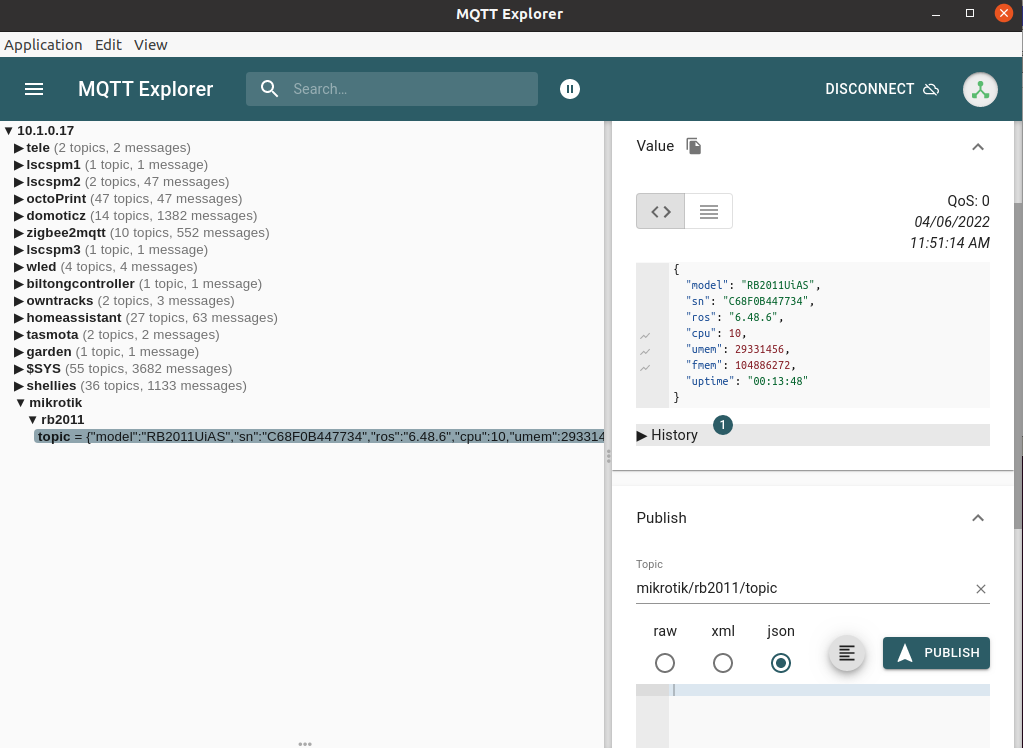
const char* mqtt_server = "mqttserver";
const char* mqtt_username = "";
const char* mqtt_password = "";
const char* clientID = "wankel";
const int tiltPin = 4;
int tiltState = 0;
int previousState = 0;
WiFiClient espClient;
PubSubClient client(espClient);
void reconnect() {
while (!client.connected()) {
if (client.connect(clientID, mqtt_username, mqtt_password)) {
} else {
delay(2000);
}
}
}
void setup()
{
{
client.setServer(mqtt_server, 1883);
pinMode(tiltPin, INPUT);
}
}
void loop() {
tiltState = digitalRead(tiltPin);
if (tiltState != previousState) {
if (tiltState == HIGH) {
client.publish("onoff-wankel/wankel/State", "0"); //
} else {
client.publish("onoff-wankel/wankel/State", "1"); //
}
delay(100);
}
previousState = tiltState;
{
if (!client.connected()) {
reconnect();
}
client.loop();
}
}
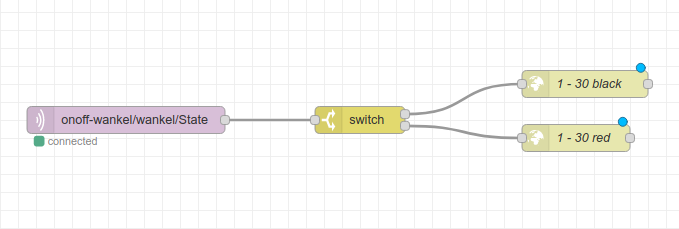
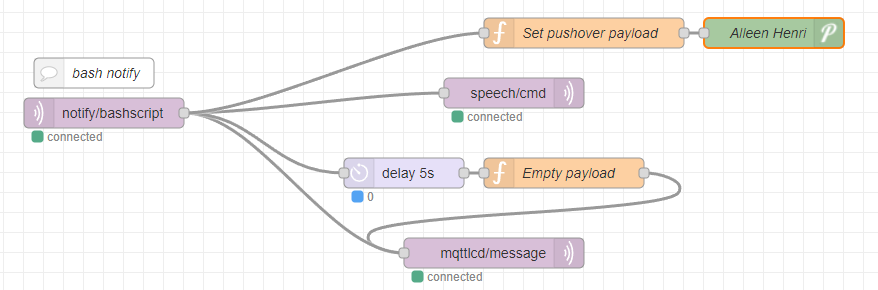
Example is using my ledserver, see other post, but i intent to made a easy to configure node red panel where the to be controlled devices are preconfigured.
[
{
"id": "9ec21acaec91aecc",
"type": "mqtt in",
"z": "54f3b5b461471f2c",
"name": "",
"topic": "onoff-wankel/wankel/State",
"qos": "2",
"datatype": "auto",
"broker": "8c74c5f6.9a7a48",
"nl": false,
"rap": true,
"rh": 0,
"inputs": 0,
"x": 400,
"y": 260,
"wires": [
[
"0fe77b535517f818"
]
]
},
{
"id": "159f65f444a0d7c2",
"type": "http request",
"z": "54f3b5b461471f2c",
"name": "1 - 30 red",
"method": "GET",
"ret": "txt",
"paytoqs": "ignore",
"url": "http://ledserver:8080/range/01/30/ff0000",
"tls": "",
"persist": false,
"proxy": "",
"authType": "",
"senderr": false,
"credentials": {},
"x": 900,
"y": 280,
"wires": [
[]
]
},
{
"id": "5806fbfd0e99daab",
"type": "http request",
"z": "54f3b5b461471f2c",
"name": "1 - 30 black",
"method": "GET",
"ret": "txt",
"paytoqs": "ignore",
"url": "http://ledserver:8080/range/01/30/000000",
"tls": "",
"persist": false,
"proxy": "",
"authType": "",
"senderr": false,
"credentials": {
"user": "",
"password": ""
},
"x": 910,
"y": 220,
"wires": [
[]
]
},
{
"id": "0fe77b535517f818",
"type": "switch",
"z": "54f3b5b461471f2c",
"name": "",
"property": "payload",
"propertyType": "msg",
"rules": [
{
"t": "eq",
"v": "0",
"vt": "str"
},
{
"t": "eq",
"v": "1",
"vt": "str"
}
],
"checkall": "true",
"repair": false,
"outputs": 2,
"x": 660,
"y": 260,
"wires": [
[
"5806fbfd0e99daab"
],
[
"159f65f444a0d7c2"
]
]
},
{
"id": "8c74c5f6.9a7a48",
"type": "mqtt-broker",
"name": "mqttserver",
"broker": "mqttserver",
"port": "1883",
"clientid": "",
"usetls": false,
"compatmode": true,
"keepalive": "15",
"cleansession": true,
"birthTopic": "",
"birthQos": "0",
"birthPayload": "",
"closeTopic": "",
"closePayload": "",
"willTopic": "",
"willQos": "0",
"willPayload": ""
}
]