At the WHY2025 hackers event, we used bigred’s antenna pole to make a huge sign using leds.
It gave me the idea to make a pole which displays digital “fireworks” using leds.
Fireworks are becoming illegal the next year in the Netherlands, I think.
So why not going digital?
12 Meter pole, 300 Leds.
There is a QR code and a website link mentioned on a page at the gate.
10 presets to select via a website.

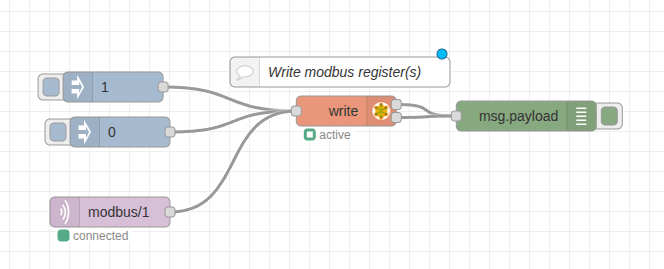
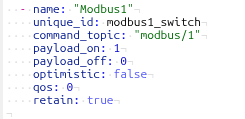
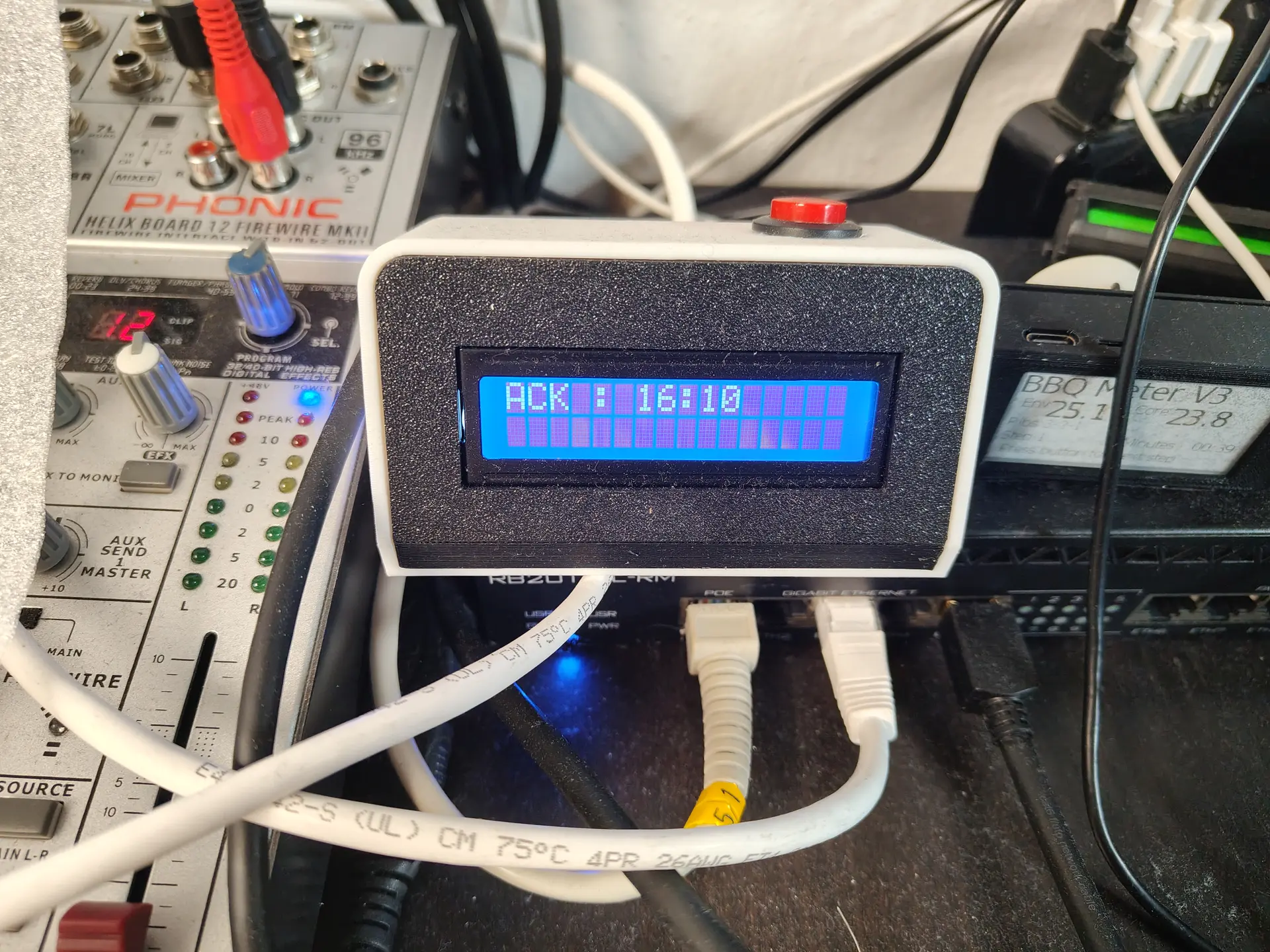
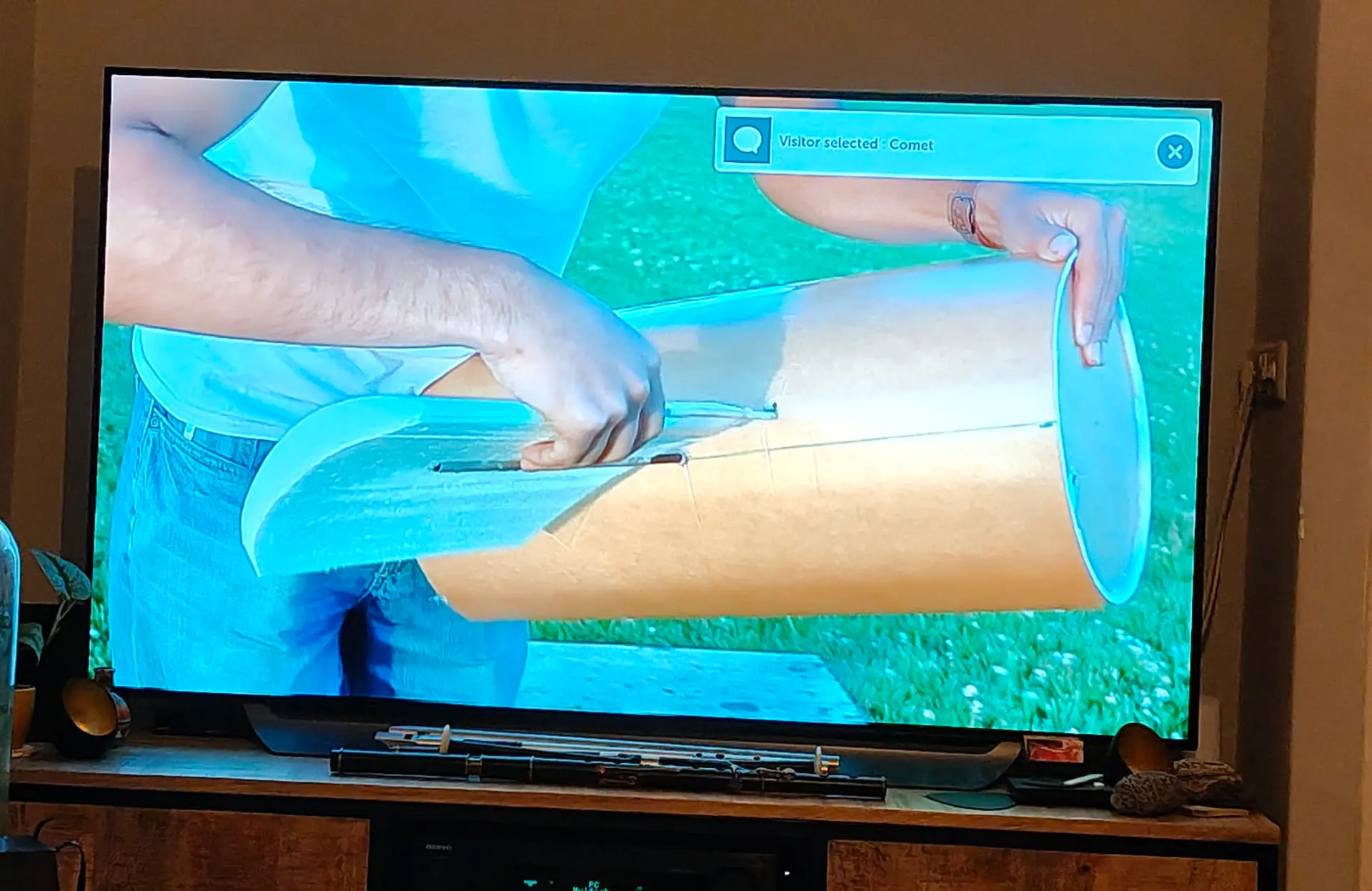
Notification on my TV
While waiting for the first visitor I made a magnetic game.
Using a bunch of magnets, and 3D printed hexagon rings.
Two players try to place magnets in a small area without moving the others. If magnets slam together, you have more pieces to place.
(Below, last player has to take those 6 pieces)

CODE for website index.html
<html>
<head>
<meta name="viewport" content="width=device-width, initial-scale=1">
<title>WLED Mast</title>
<style>
body {
background: #111;
color: #fff;
font-family: Arial;
margin: 0;
padding: 20px;
text-align: center;
}
.grid {
display: grid;
grid-template-columns: repeat(2, 1fr);
gap: 18px;
}
button {
padding: 25px;
font-size: 22px;
border-radius: 20px;
border: none;
background: #333;
color: #fff;
font-weight: bold;
}
button:active {
background: #555;
}
</style>
</head>
<body>
<h1>WLED Mast</h1>
<div class="grid">
<button onclick="run('b1')">off</button>
<button onclick="run('b2')">fireworks</button>
<button onclick="run('b3')">sound<BR>reactive</button>
<button onclick="run('b4')">bounch-balls</button>
<button onclick="run('b5')">fire</button>
<button onclick="run('b6')">juggle</button>
<button onclick="run('b7')">swing</button>
<button onclick="run('b8')">sparkle</button>
<button onclick="run('b9')">popcorn</button>
<button onclick="run('b10')">comet</button>
</div>
<script>
const API_KEY = "misuse-prevent";
function run(action) {
fetch(`/action.php?action=${action}&key=${API_KEY}`)
.then(r => r.json())
.then(j => console.log(j))
.catch(err => alert("Error"));
}
</script>
</body>
</html>
CODE for Wled API
<?php
$public_api_key = "misuse-prevent";
if (!isset($_GET['key']) || $_GET['key'] !== $public_api_key) {
http_response_code(401);
die("Unauthorized");
}
$action = $_GET['action'] ?? null;
// Map 10 buttons → WLED preset numbers
$allowed_actions = [
"b1" => 19,
"b2" => 22,
"b3" => 23,
"b4" => 20,
"b5" => 21,
"b6" => 3,
"b7" => 8,
"b8" => 2,
"b9" => 4,
"b10" => 14
];
if (!$action || !isset($allowed_actions[$action])) {
http_response_code(400);
die("Invalid action");
}
$preset = $allowed_actions[$action];
// ---- WLED IP address ----
$wled_ip = "http://WLEDDEVICEIP"; // <-- CHANGE THIS
// API endpoint
$url = $wled_ip . "/win&PL=" . $preset;
// Call WLED directly
$ch = curl_init($url);
curl_setopt($ch, CURLOPT_RETURNTRANSFER, true);
curl_setopt($ch, CURLOPT_CONNECTTIMEOUT, 2);
curl_setopt($ch, CURLOPT_TIMEOUT, 2);
$response = curl_exec($ch);
$error = curl_error($ch);
curl_close($ch);
header("Content-Type: application/json");
if ($error) {
echo json_encode(["ok" => false, "error" => $error]);
} else {
echo json_encode(["ok" => true, "preset" => $preset]);
}