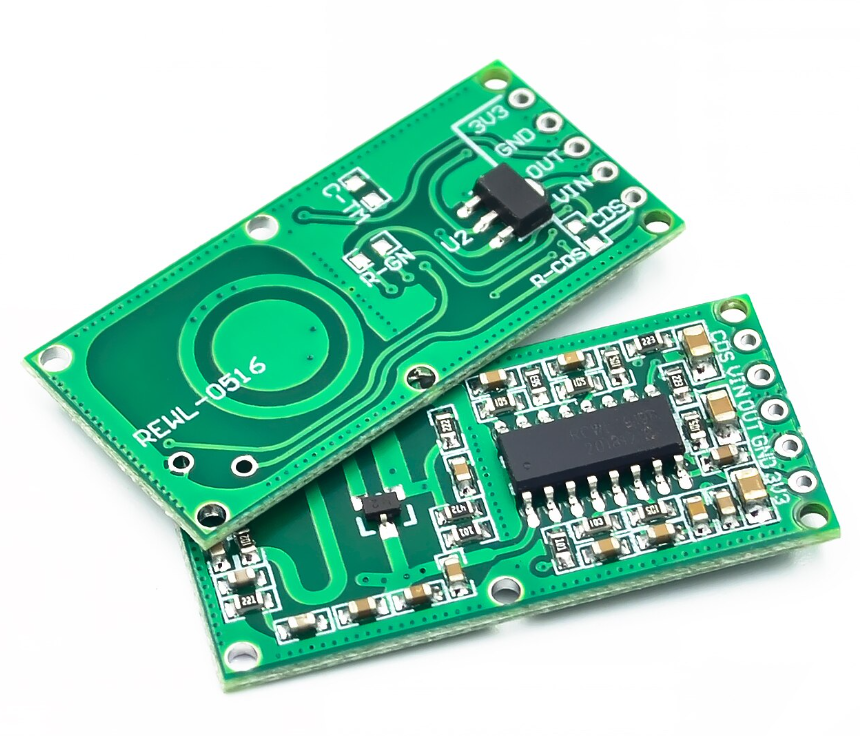
Last year i was playing with this radar module also, but today i made a version with MQTT and a linux client.
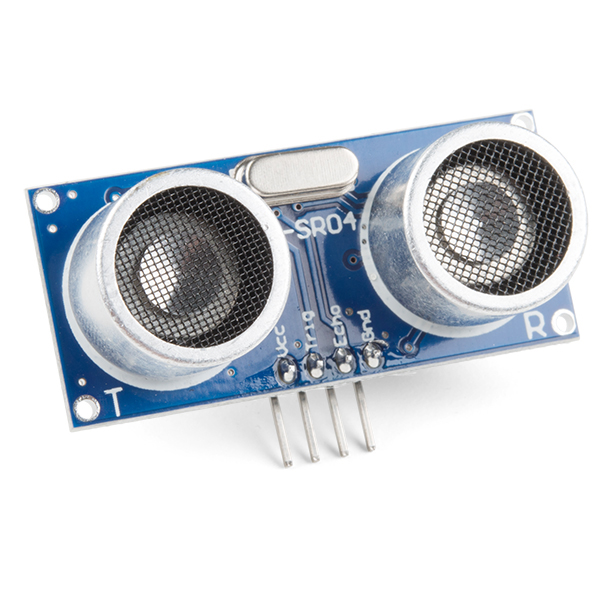
(There is a project on the internet which uses a HC-SR04, and a arduino connected to the Laptop. This setup is more sensitive and no need for a usb thinghy.)
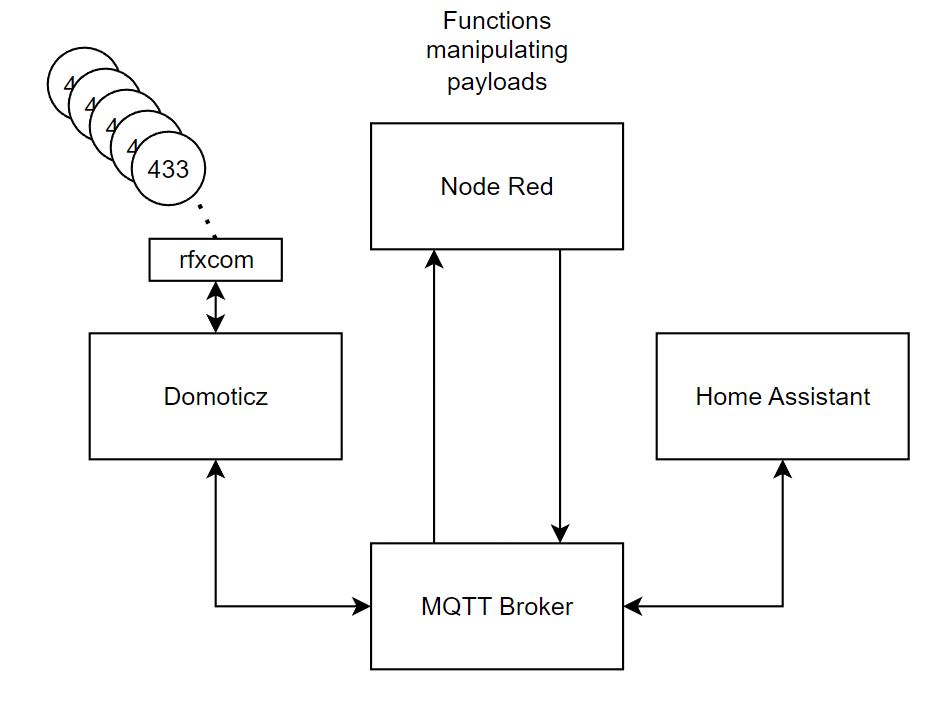
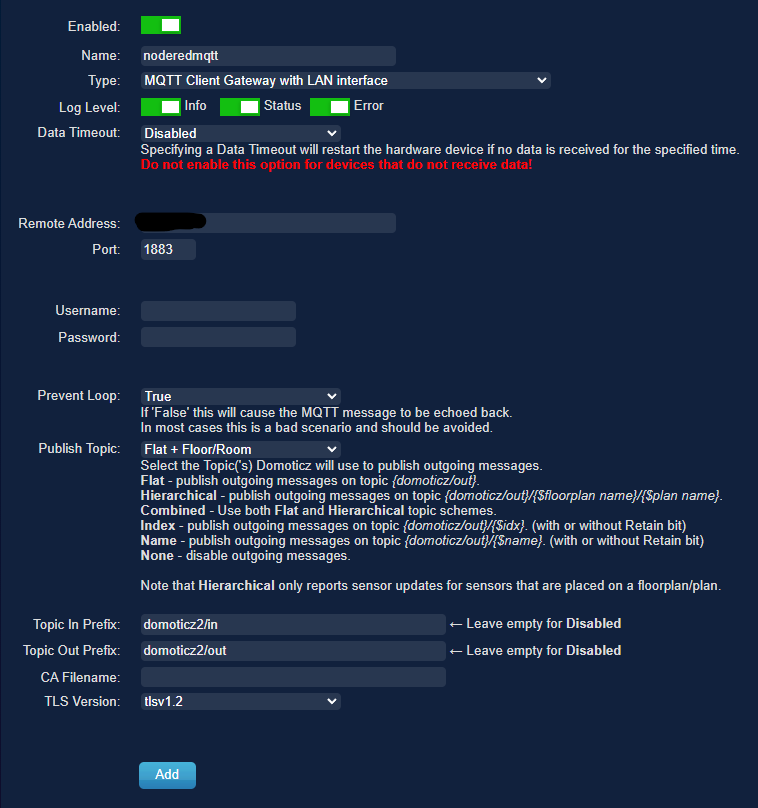
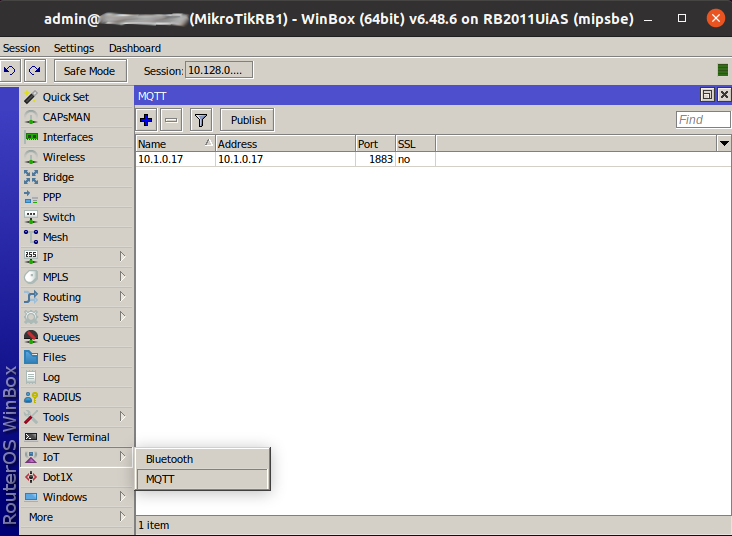
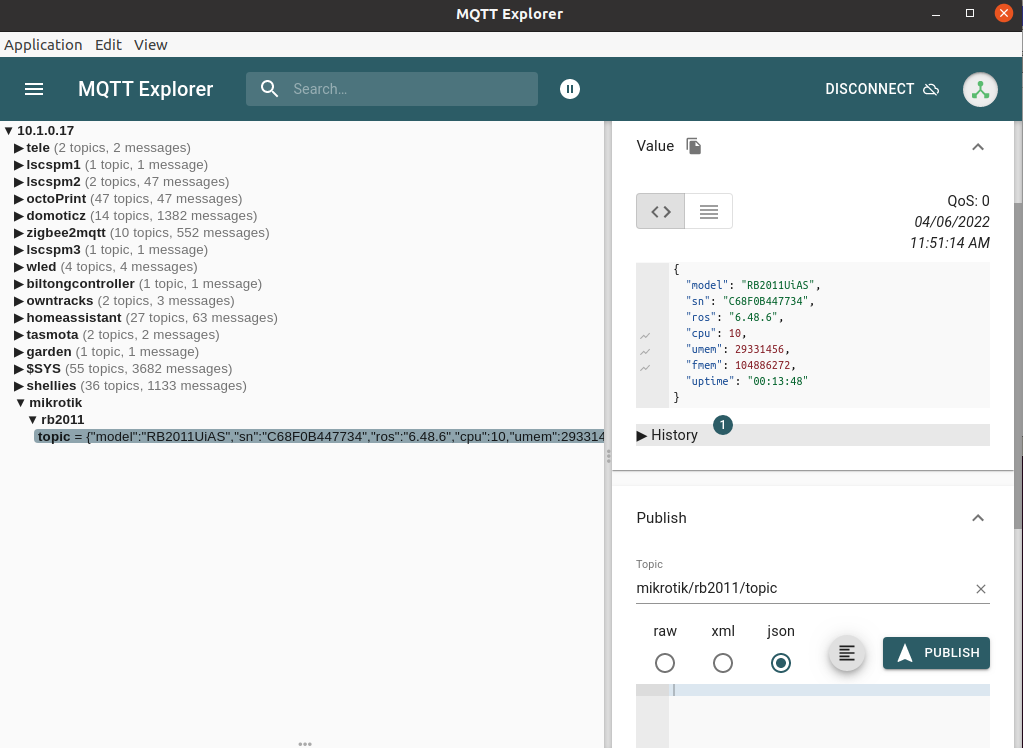
When using MQTT i can integrate this in HomeAssistant, Domoticz, NodeRed and more.
But i’ve written a python script which runs on my Laptop.
For example i can: Kill vlc, change to my work desktop, stop sound output and lock the screen. (everything you can script)
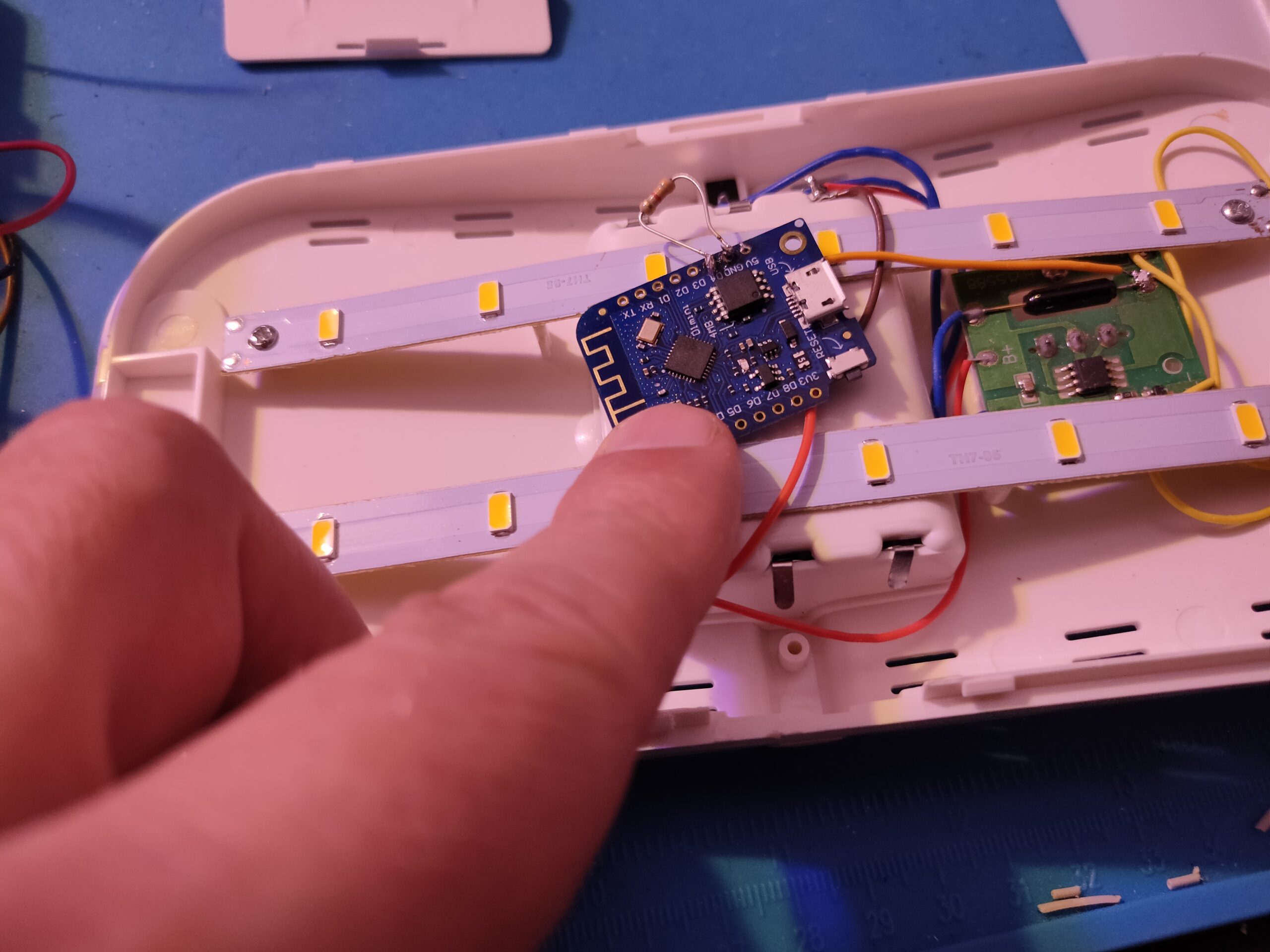
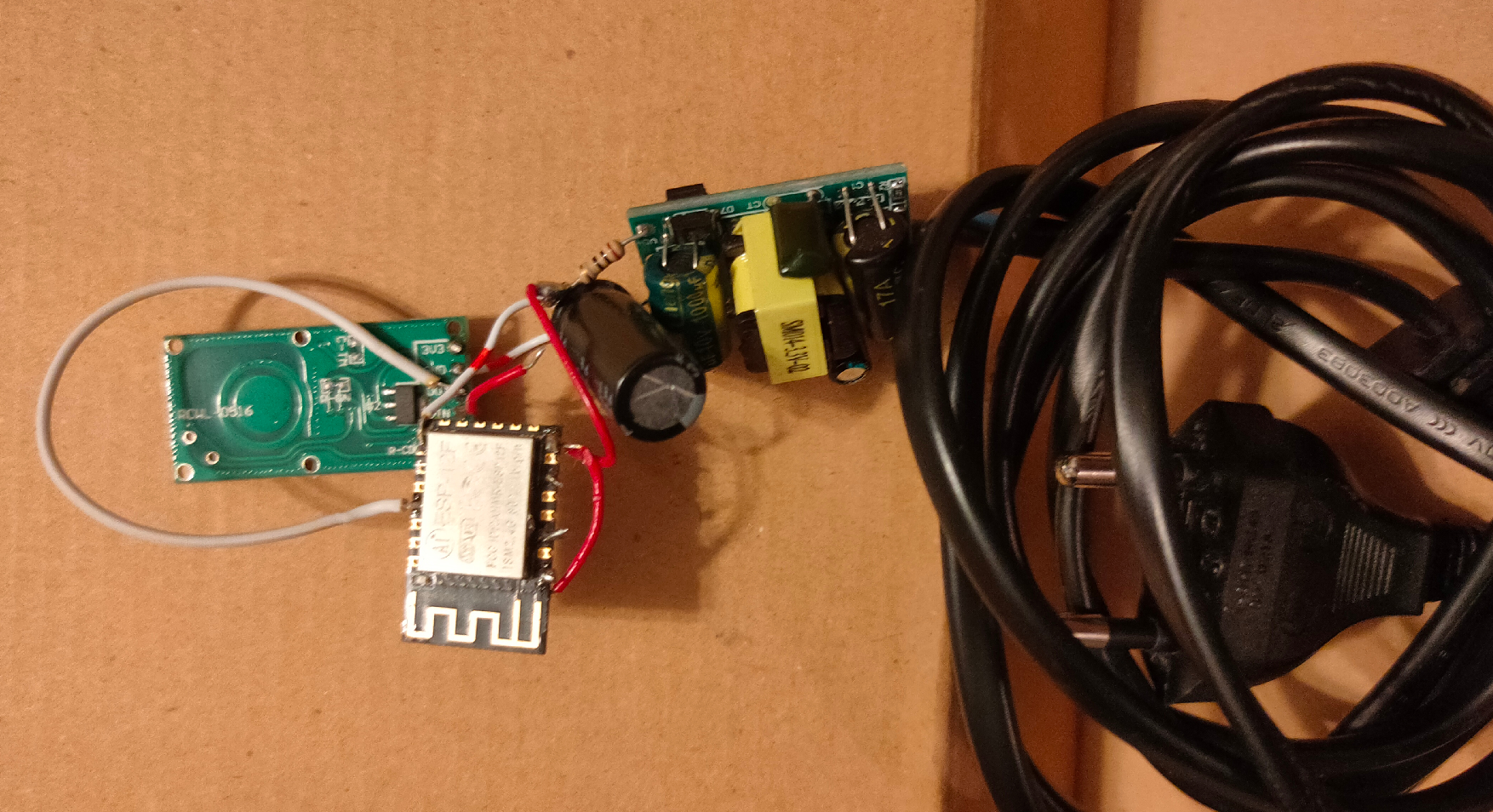
I wanted to have a “mobile” version of the sensor so i can place it anywhere. (Frontdoor, gardengate, candydrawer 🙂 )
These modules are very cheap, but do their job well!
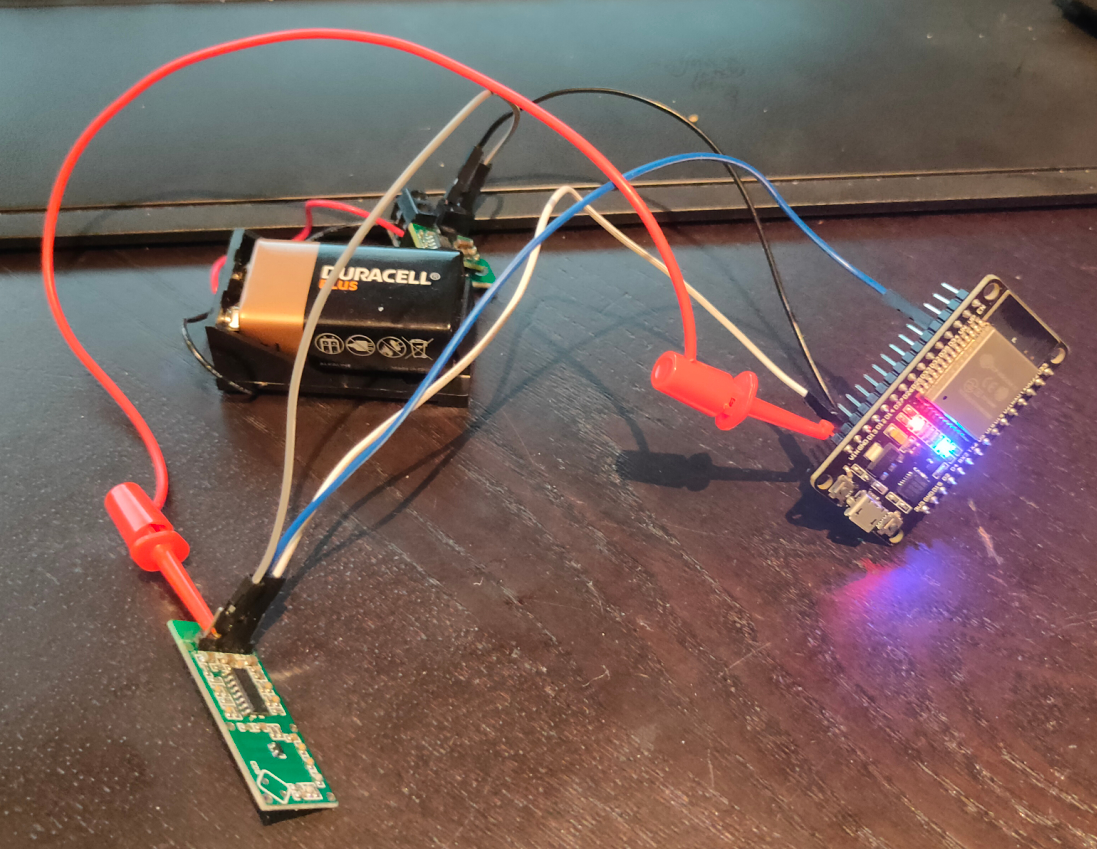
I’ve used a Wroom ESP32 and a BattBorg together with the module, that’s it.
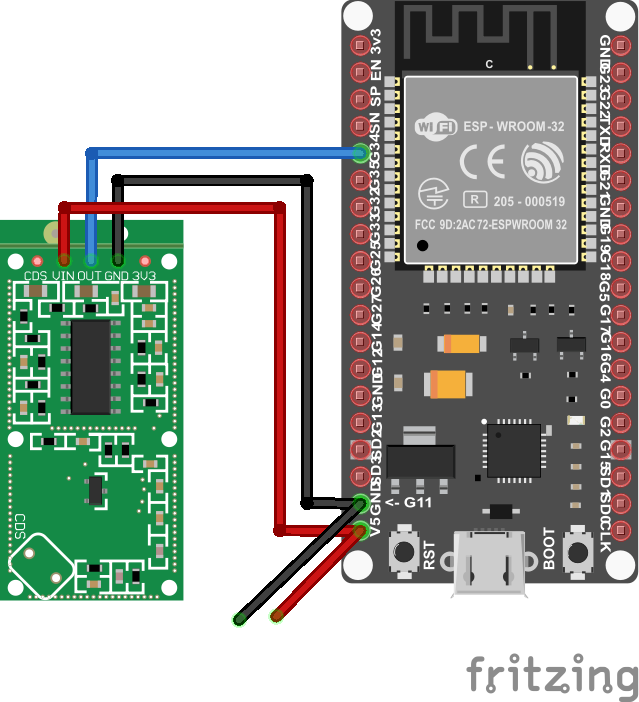
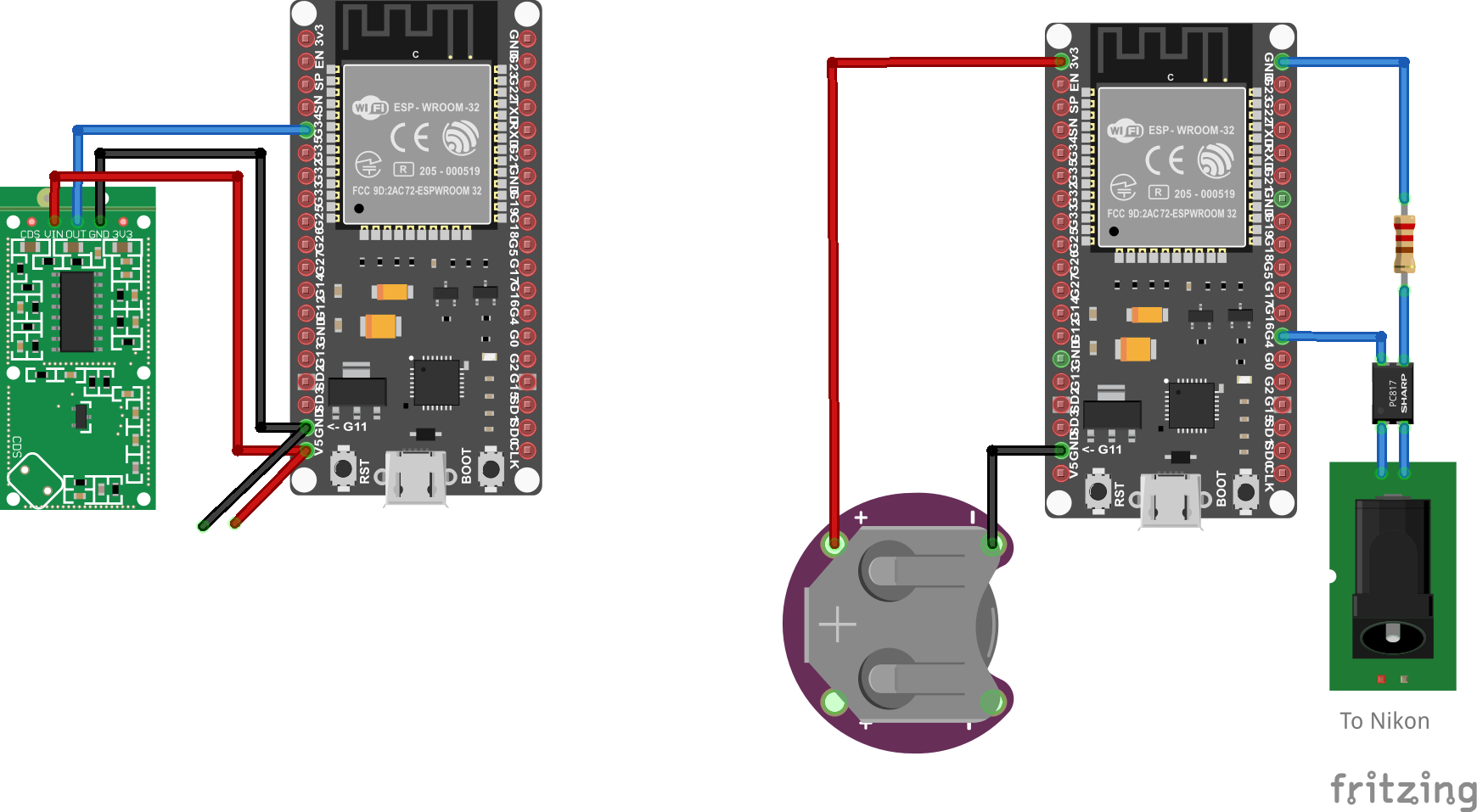
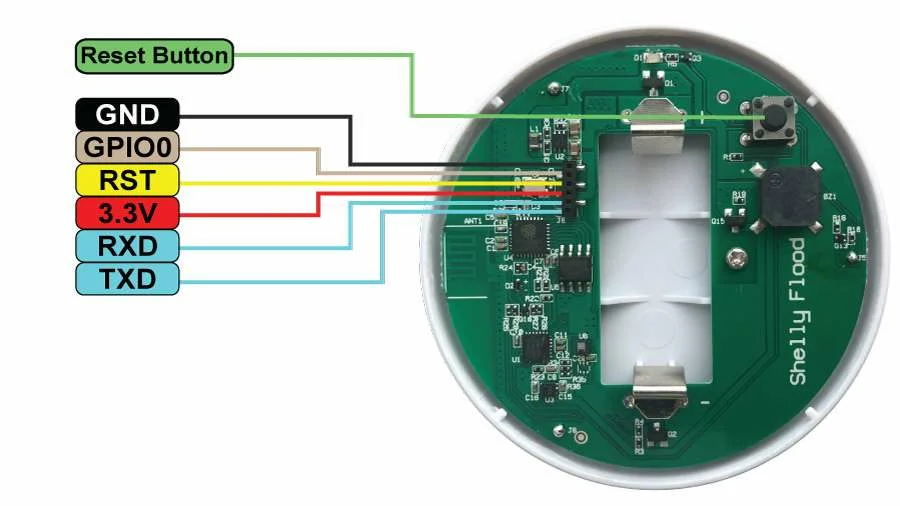
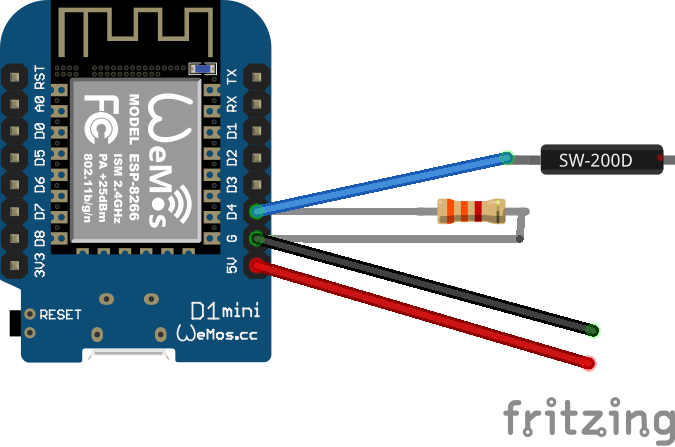
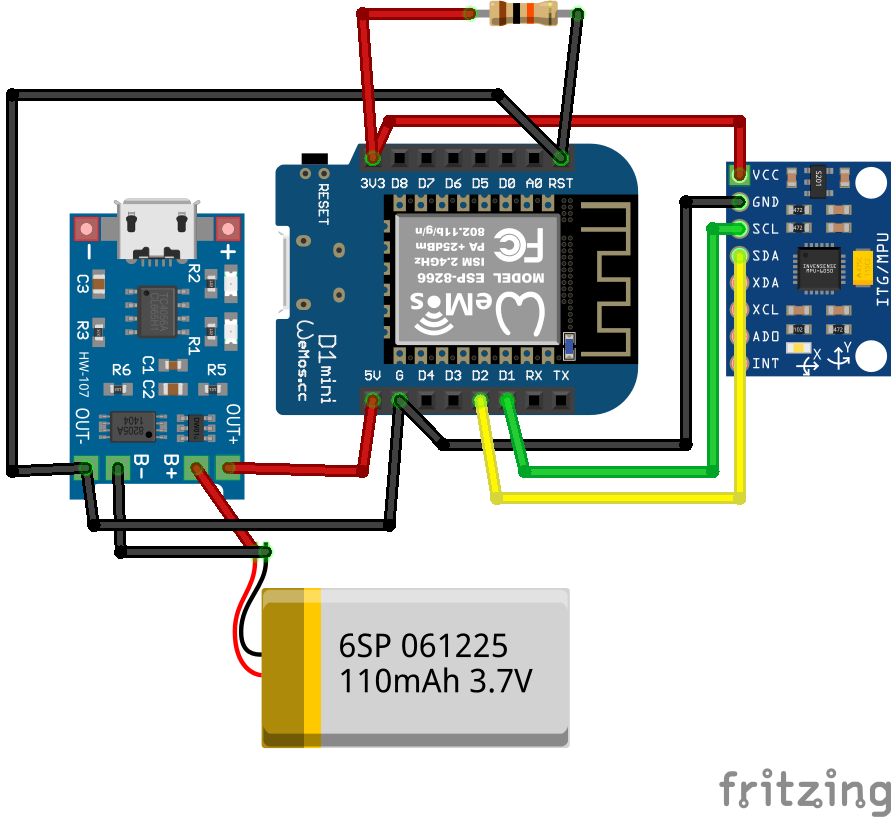
Simplified schematic (without the battborg)
I’m using PIN34 as an analog input.
Radar module pins:
- CDS not used
- VIN 5V power
- OUT 0-3.3V signal (analog)
- GND
- 3v3 not used
Arduino sketch
#include <WiFi.h>
#include <PubSubClient.h>
#include <Wire.h>
const char* ssid = "MYSSID";
const char* password = "MYPASS";
const char* mqtt_server = "IP-MQTT-SERVER";
const char* mqtt_username = "";
const char* mqtt_password = "";
const char* clientID = "radar";
const int tiltPin = 34;
int tiltState = 0;
int previousState = 0;
WiFiClient espClient;
PubSubClient client(espClient);
String translateEncryptionType(wifi_auth_mode_t encryptionType) {
switch (encryptionType) {
case (WIFI_AUTH_OPEN):
return "Open";
case (WIFI_AUTH_WEP):
return "WEP";
case (WIFI_AUTH_WPA_PSK):
return "WPA_PSK";
case (WIFI_AUTH_WPA2_PSK):
return "WPA2_PSK";
case (WIFI_AUTH_WPA_WPA2_PSK):
return "WPA_WPA2_PSK";
case (WIFI_AUTH_WPA2_ENTERPRISE):
return "WPA2_ENTERPRISE";
}
}
void scanNetworks() {
int numberOfNetworks = WiFi.scanNetworks();
Serial.print("Number of networks found: ");
Serial.println(numberOfNetworks);
for (int i = 0; i < numberOfNetworks; i++) {
Serial.print("Network name: ");
Serial.println(WiFi.SSID(i));
Serial.print("Signal strength: ");
Serial.println(WiFi.RSSI(i));
Serial.print("MAC address: ");
Serial.println(WiFi.BSSIDstr(i));
Serial.print("Encryption type: ");
String encryptionTypeDescription = translateEncryptionType(WiFi.encryptionType(i));
Serial.println(encryptionTypeDescription);
Serial.println("-----------------------");
}
}
void connectToNetwork() {
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(1000);
Serial.println("Establishing connection to WiFi..");
}
Serial.println("Connected to network");
}
void reconnect() {
while (!client.connected()) {
if (client.connect(clientID, mqtt_username, mqtt_password)) {
} else {
delay(2000);
}
}
}
void setup()
{
{
Serial.begin(115200);
scanNetworks();
connectToNetwork();
Serial.println(WiFi.macAddress());
Serial.println(WiFi.localIP());
client.setServer(mqtt_server, 1883);
pinMode(tiltPin, INPUT);
}
}
void loop() {
tiltState = analogRead(tiltPin);
if (tiltState < 3048) {
client.publish("radar/state", "0"); //
} else {
client.publish("radar/state", "1"); //
}
delay(100);
{
if (!client.connected()) {
reconnect();
}
client.loop();
}
}
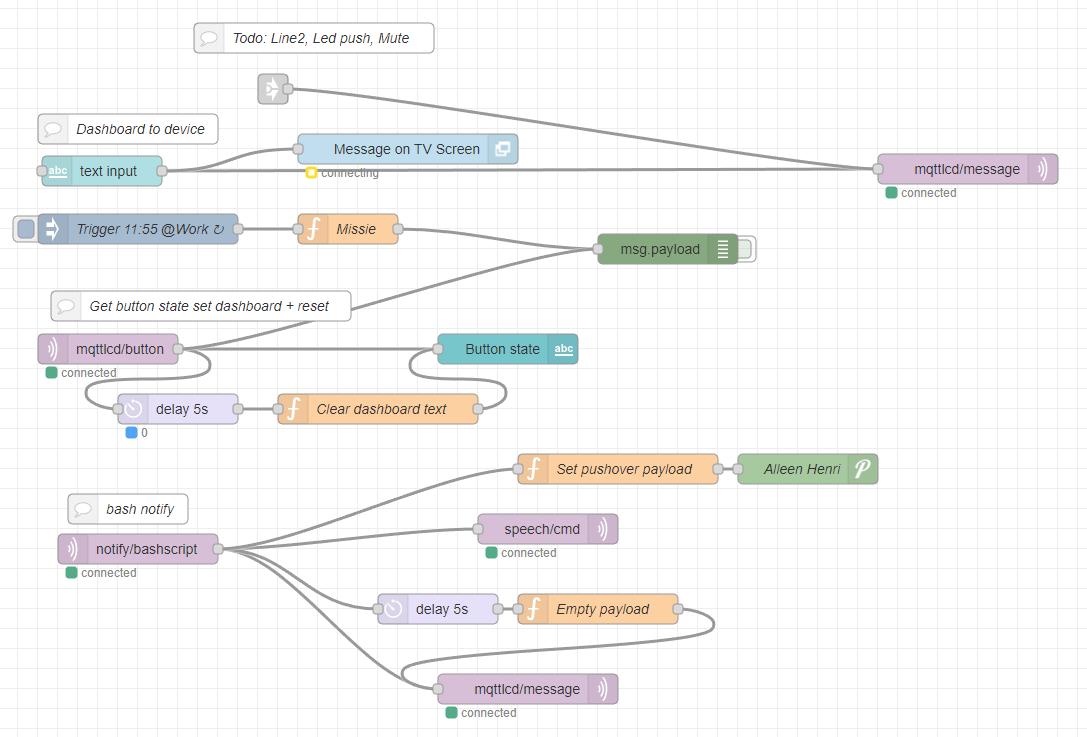
Lockscreen!
Below shows the speed of detection, and sending though the network
Python script which does a lock-screen using XDOTOOL
from paho.mqtt import client as mqtt_client
import subprocess
import time
broker = 'MQTT-SERVER'
port = 1883
topic = "radar/state"
client_id = "radarclient"
def connect_mqtt() -> mqtt_client:
def on_connect(client, userdata, flags, rc):
if rc == 0:
print("Connected to MQTT Broker!")
else:
print("Failed to connect, return code %d\n", rc)
client = mqtt_client.Client(client_id)
client.on_connect = on_connect
client.connect(broker, port)
return client
def subscribe(client: mqtt_client):
def on_message(client, userdata, msg):
state = msg.payload.decode()
print (state)
if state == "1":
subprocess.Popen(["xdotool","key","Super_L+l"])
time.sleep(30)
client.subscribe(topic)
client.on_message = on_message
def run():
client = connect_mqtt()
subscribe(client)
client.loop_forever()
if __name__ == '__main__':
run()
change
subprocess.Popen([“xdotool”,”key”,”Super_L+l”])
into
subprocess.Popen([“switchdesktop”])
to run a script named switchdesktop
#!/bin/bash # This is the switchdesktop script, it goes to the next screen using winows-page-down combo xdotool key "Super_L+Page_Down"
Todo:
3D print a case
Make a version which becomes a Access Point.
Then make another arduino setup which controls my Nikon.
So it can act like a wildcam (offline)
Something like below, using a optocoupler ( i still got some leftovers from my doorbell to gpio-pin project.)