Using Esphome in HA, you can flash arduino’s using your browser.
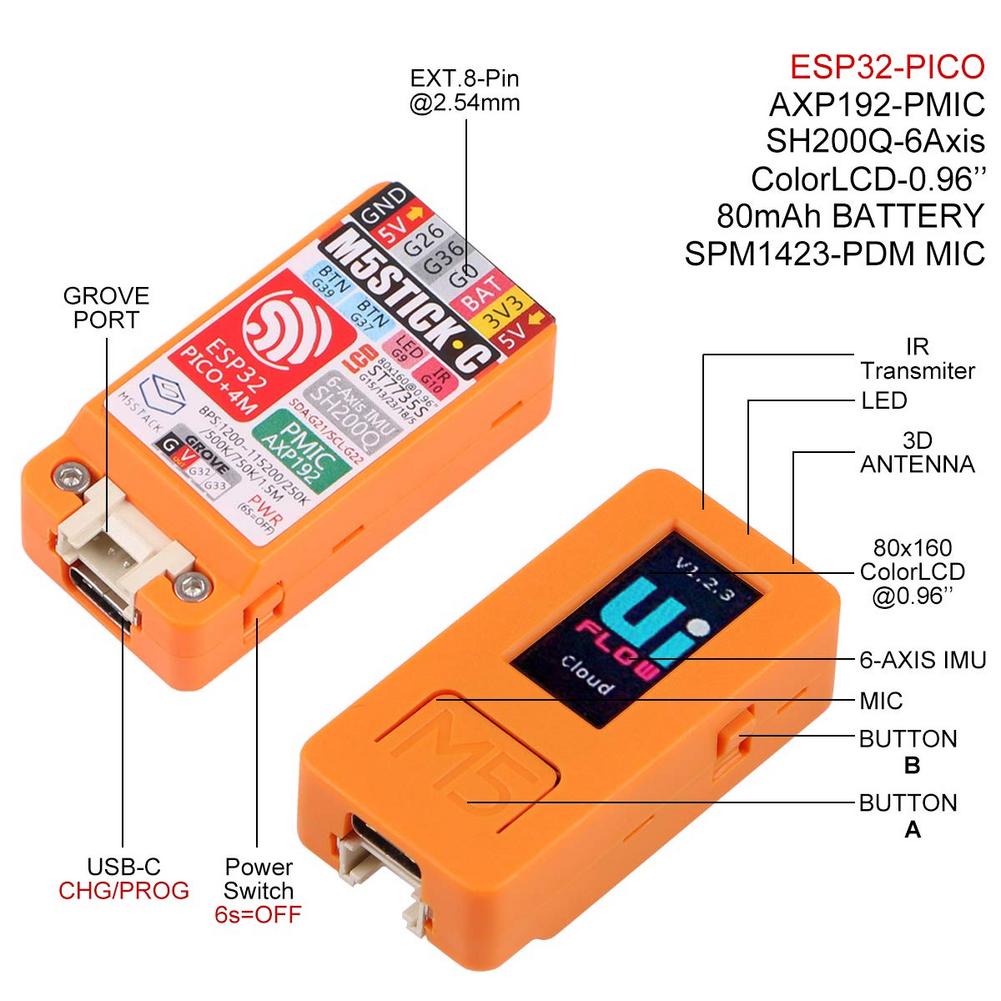
I wanted to test with a M5stickC because of the intergrated sensors.
Steps to take:
- Install Esphome
add repo from https://esphome.io/guides/getting_started_hassio.html - Connect M5Stick to usb ( you can do this from the same machine where your browser is running ), i connected the device directly to the NUC where Home Assistant is running.
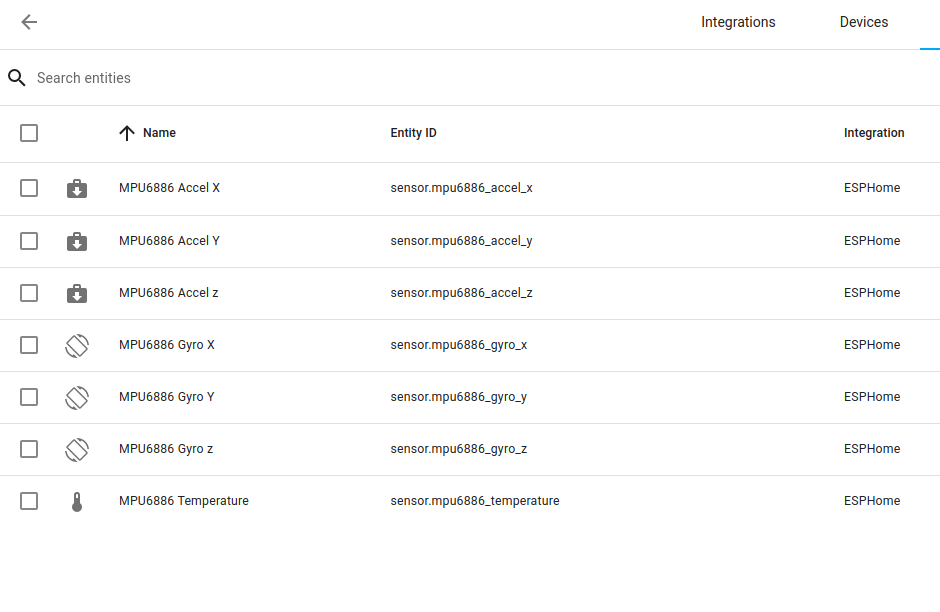
- Open EspHome integration
- New Device (First time it will ask for your default Wifi credentials)
- Give it a name, and select Pick specifiec board (M5Stick-c)
- When presented a edit field with yml, past below for first test
- Click install to flash
esphome:
name: m5stickc
esp32:
board: m5stick-c
framework:
type: arduino
# Enable logging
logger:
# Enable Home Assistant API
api:
ota:
password: "xxxxxxxxxxxxxxxxxxxxxxx"
wifi:
ssid: !secret wifi_ssid
password: !secret wifi_password
# Enable fallback hotspot (captive portal) in case wifi connection fails
ap:
ssid: "M5Stickc Fallback Hotspot"
password: "xxxxxxxxxxxxxxx"
captive_portal:
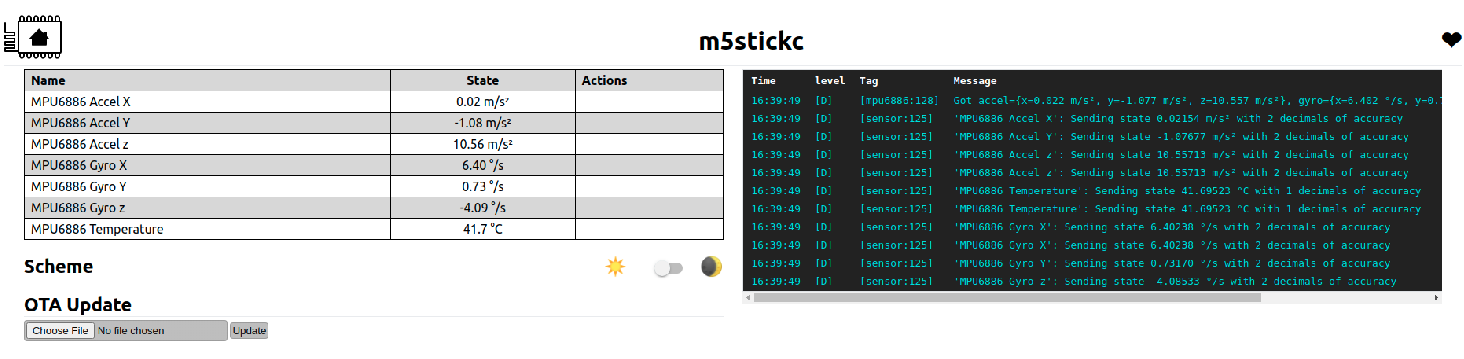
web_server:
globals:
i2c:
- id: bus_b
sda: 21
scl: 22
scan: true
- id: bus_c
sda: 32
scl: 33
scan: true
binary_sensor:
sensor:
- platform: mpu6886
i2c_id: bus_b
address: 0x68
accel_x:
name: "MPU6886 Accel X"
accel_y:
name: "MPU6886 Accel Y"
accel_z:
name: "MPU6886 Accel z"
gyro_x:
name: "MPU6886 Gyro X"
gyro_y:
name: "MPU6886 Gyro Y"
gyro_z:
name: "MPU6886 Gyro z"
temperature:
name: "MPU6886 Temperature"
spi:
clk_pin: GPIO13
mosi_pin: GPIO15
# Below is test
color:
- id: my_red
red: 100%
green: 0%
blue: 0%
- id: my_yellow
red: 100%
green: 100%
blue: 0%
- id: my_green
red: 0%
green: 100%
blue: 0%
- id: my_blue
red: 0%
green: 0%
blue: 100%
- id: my_gray
red: 50%
green: 50%
blue: 50%
#Display size 135*240
display:
- platform: st7789v
id: tft
cs_pin: GPIO5
dc_pin: GPIO23
reset_pin: GPIO18
rotation: 270
Biggest problem was finding GPIO pins for i2c.