UPDATE 20240122 : below
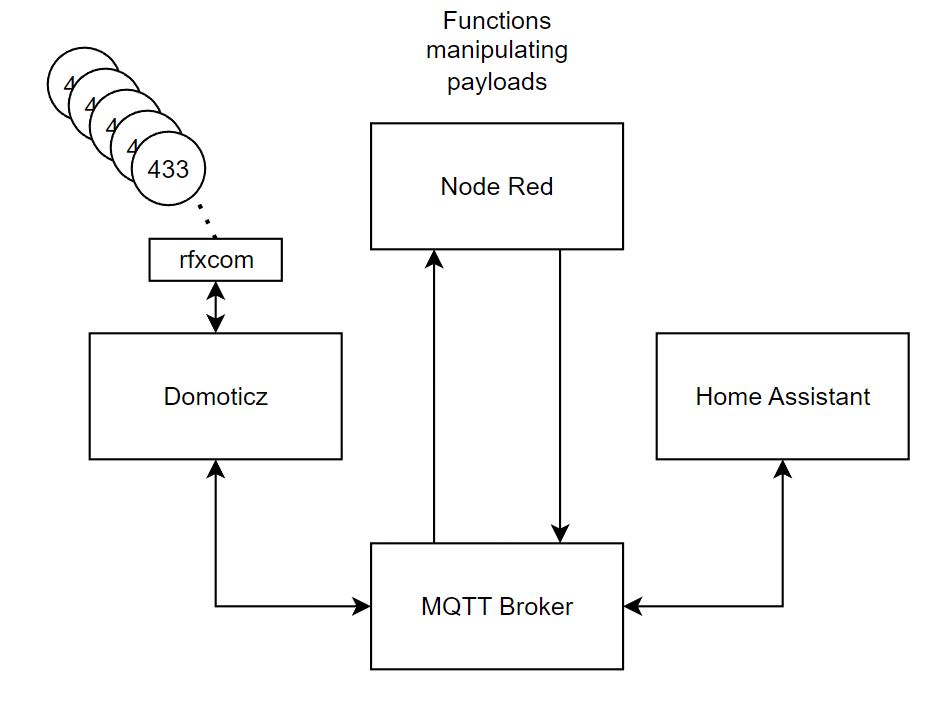
I’ve got my RFXCOM connected to my Domoticz, and not connected to my HA.

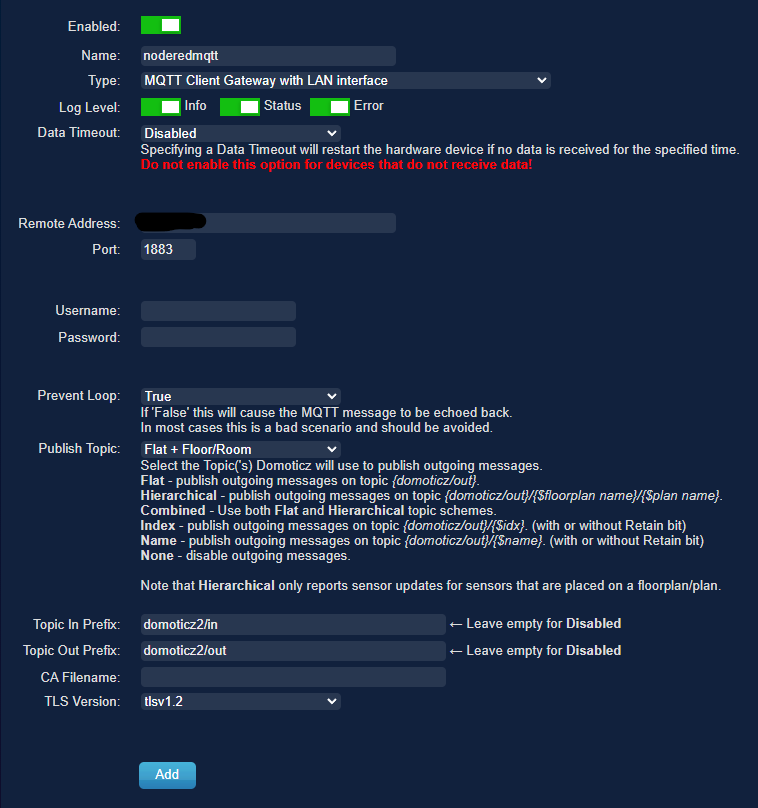
To have the changes of my IOT devices being known to HomeAssistant I wanted to use mqtt.
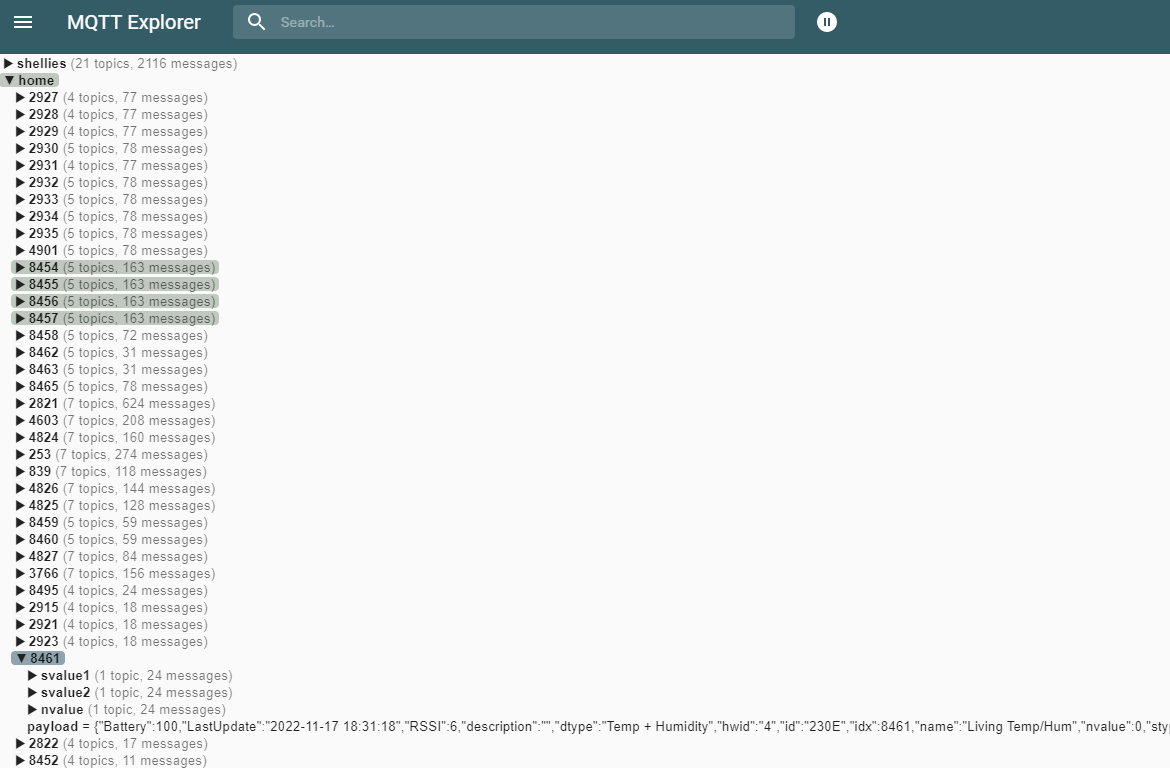
Domoticz writes the mqtt topic (payload) like this
(topic: domoticz/out)
{
"Battery" : 100,
"LastUpdate" : "2022-11-17 18:21:59",
"RSSI" : 6,
"description" : "",
"dtype" : "Temp + Humidity",
"hwid" : "4",
"id" : "230E",
"idx" : 8461,
"name" : "Living Temp/Hum",
"nvalue" : 0,
"stype" : "Cresta, TFA TS34C",
"svalue1" : "20.0",
"svalue2" : "60",
"svalue3" : "1",
"unit" : 1
}
So you can’t see which device it is by the topic name, the idx is in the json (8461)
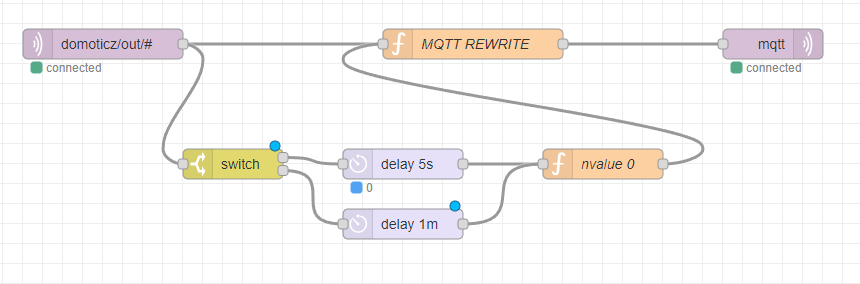
To get this device ( a temperature sensor) into HA using mqtt i rewrote the mqtt topic using NodeRed
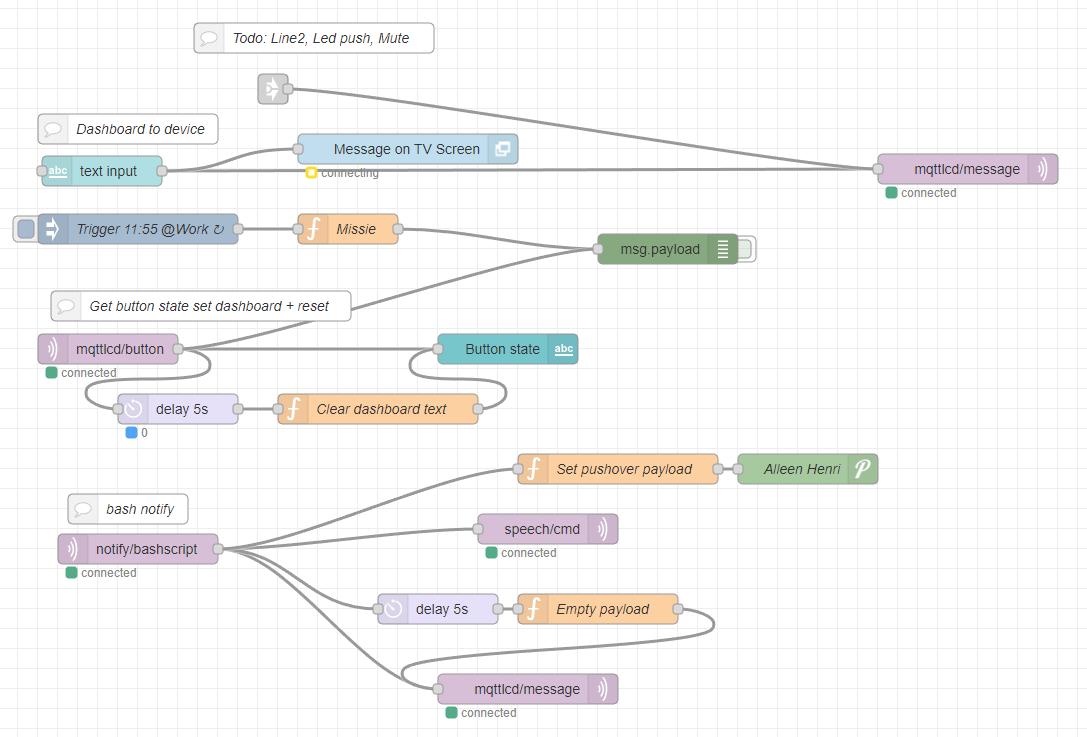
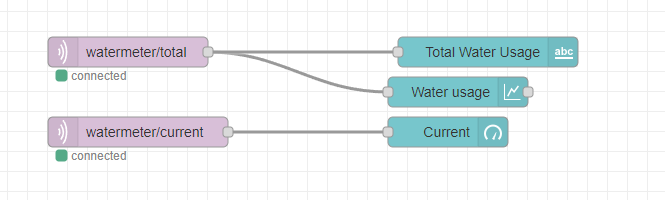
NodeRed flow

[
{
"id": "836cc419ddb2ca2b",
"type": "mqtt in",
"z": "cfb00976f06591d6",
"name": "",
"topic": "domoticz/out/#",
"qos": "2",
"datatype": "auto-detect",
"broker": "8c74c5f6.9a7a48",
"nl": false,
"rap": true,
"rh": 0,
"inputs": 0,
"x": 200,
"y": 140,
"wires": [
[
"dbe628e18027a287"
]
]
},
{
"id": "a6cb517fd1cc9987",
"type": "mqtt out",
"z": "cfb00976f06591d6",
"name": "",
"topic": "",
"qos": "",
"retain": "",
"respTopic": "",
"contentType": "",
"userProps": "",
"correl": "",
"expiry": "",
"broker": "8c74c5f6.9a7a48",
"x": 870,
"y": 140,
"wires": []
},
{
"id": "dbe628e18027a287",
"type": "function",
"z": "cfb00976f06591d6",
"name": "MQTT REWRITE",
"func": "var varidx = msg.payload.idx;\nmsg.topic = \"home/\"+varidx+\"/payload\";\nreturn msg;\n",
"outputs": 1,
"noerr": 0,
"initialize": "",
"finalize": "",
"libs": [],
"x": 570,
"y": 140,
"wires": [
[
"a6cb517fd1cc9987"
]
]
},
{
"id": "8c74c5f6.9a7a48",
"type": "mqtt-broker",
"name": "MQTTSERVERIP",
"broker": "MQTTSERVERIP",
"port": "1883",
"clientid": "",
"usetls": false,
"compatmode": true,
"keepalive": "15",
"cleansession": true,
"birthTopic": "",
"birthQos": "0",
"birthPayload": "",
"closeTopic": "",
"closePayload": "",
"willTopic": "",
"willQos": "0",
"willPayload": ""
}
]
The function node code ( rewrites the mqtt topic)
var varidx = msg.payload.idx; msg.topic = "home/"+varidx+"/payload"; return msg;
Now we have a idx separated payload “home/IDX/payload”
(The other entries svalue/nvalue are from testing.
Adding the MQTT entries to HomeAssistant configuration.conf
mqtt:
sensor:
- name: "LivingTemperature"
state_topic: "home/8461/payload"
unit_of_measurement: "°C"
value_template: "{{ value_json.svalue1 }}"
- name: "LivingHumidity"
state_topic: "home/8461/payload"
unit_of_measurement: "%"
value_template: "{{ value_json.svalue2 }}"
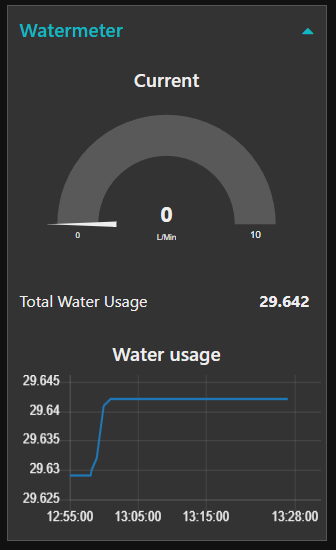
Now i can add the card to the dashboard.
This should now be a generic mqtt translator
A quick update:
Adding a motion sensor:
Home Assistant
- name: "LivingMotion"
state_topic: "home/45/payload"
value_template: "{{ value_json.nvalue }}"
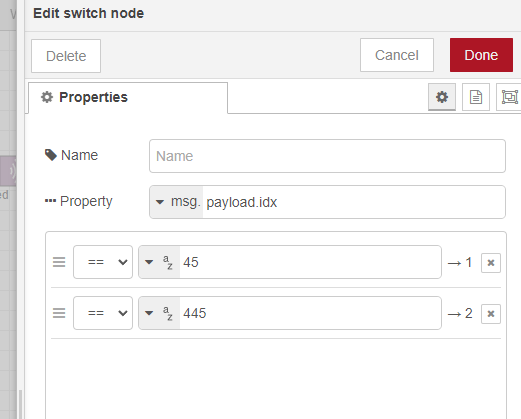
Add sensors to be reset to the switch node
[
{
"id": "836cc419ddb2ca2b",
"type": "mqtt in",
"z": "cfb00976f06591d6",
"name": "",
"topic": "domoticz/out/#",
"qos": "2",
"datatype": "auto-detect",
"broker": "8c74c5f6.9a7a48",
"nl": false,
"rap": true,
"rh": 0,
"inputs": 0,
"x": 200,
"y": 140,
"wires": [
[
"dbe628e18027a287",
"768bb6e4b6731436"
]
]
},
{
"id": "a6cb517fd1cc9987",
"type": "mqtt out",
"z": "cfb00976f06591d6",
"name": "",
"topic": "",
"qos": "",
"retain": "",
"respTopic": "",
"contentType": "",
"userProps": "",
"correl": "",
"expiry": "",
"broker": "8c74c5f6.9a7a48",
"x": 870,
"y": 140,
"wires": []
},
{
"id": "dbe628e18027a287",
"type": "function",
"z": "cfb00976f06591d6",
"name": "MQTT REWRITE",
"func": "var varidx = msg.payload.idx;\nmsg.topic = \"home/\"+varidx+\"/payload\";\nreturn msg;\n",
"outputs": 1,
"noerr": 0,
"initialize": "",
"finalize": "",
"libs": [],
"x": 570,
"y": 140,
"wires": [
[
"a6cb517fd1cc9987"
]
]
},
{
"id": "768bb6e4b6731436",
"type": "switch",
"z": "cfb00976f06591d6",
"name": "",
"property": "payload.idx",
"propertyType": "msg",
"rules": [
{
"t": "eq",
"v": "45",
"vt": "str"
}
],
"checkall": "true",
"repair": false,
"outputs": 1,
"x": 330,
"y": 260,
"wires": [
[
"e46fed76a596a719"
]
]
},
{
"id": "e46fed76a596a719",
"type": "delay",
"z": "cfb00976f06591d6",
"name": "",
"pauseType": "delay",
"timeout": "5",
"timeoutUnits": "seconds",
"rate": "1",
"nbRateUnits": "1",
"rateUnits": "second",
"randomFirst": "1",
"randomLast": "5",
"randomUnits": "seconds",
"drop": false,
"allowrate": false,
"outputs": 1,
"x": 500,
"y": 260,
"wires": [
[
"3f7eeffc8d066de3"
]
]
},
{
"id": "3f7eeffc8d066de3",
"type": "function",
"z": "cfb00976f06591d6",
"name": "nvalue 0",
"func": "msg.payload.nvalue = 0;\nreturn msg;",
"outputs": 1,
"noerr": 0,
"initialize": "",
"finalize": "",
"libs": [],
"x": 700,
"y": 260,
"wires": [
[
"dbe628e18027a287"
]
]
},
{
"id": "8c74c5f6.9a7a48",
"type": "mqtt-broker",
"name": "MQTTIP",
"broker": "MQTTIP",
"port": "1883",
"clientid": "",
"usetls": false,
"compatmode": true,
"keepalive": "15",
"cleansession": true,
"birthTopic": "",
"birthQos": "0",
"birthPayload": "",
"closeTopic": "",
"closePayload": "",
"willTopic": "",
"willQos": "0",
"willPayload": ""
}
]
UPDATE 20240122
I’m using domoticz as a 433->mqtt bridge, and some virtual devices i can toggle with curl (bash scripts)
I needed to make a custom 433 door sensor in Home Assistant with toggles to OFF after a few seconds. (There is NO off signal in this cheap sensor i’m using)

I’m changing the payload complete, to have a payload which matches the device class for door: (state with on/off)
It was nvalue = 0/1
(Whenever the IDX changes, I only have to update this Nodered part)
HA won’t notice the change.
var nvalue = msg.payload.nvalue;
msg.payload = {};
if(nvalue == 1)
{
msg.payload.state = "ON";
return msg;
}
AND after 5 seconds
msg.payload = {};
msg.payload.state = "OFF";
return msg;
Node-RED Deploy
Export nodes
Export
[
{
"id": "d8a1af40d14307a9",
"type": "mqtt in",
"z": "a8ec6104.cb08c",
"name": "",
"topic": "home/35/payload",
"qos": "2",
"datatype": "auto-detect",
"broker": "8c74c5f6.9a7a48",
"nl": false,
"rap": true,
"rh": 0,
"inputs": 0,
"x": 220,
"y": 720,
"wires": [
[
"ac3f66d770bb8f56"
]
]
},
{
"id": "31cb1ca9e4060710",
"type": "delay",
"z": "a8ec6104.cb08c",
"name": "",
"pauseType": "delay",
"timeout": "5",
"timeoutUnits": "seconds",
"rate": "1",
"nbRateUnits": "1",
"rateUnits": "second",
"randomFirst": "1",
"randomLast": "5",
"randomUnits": "seconds",
"drop": false,
"allowrate": false,
"outputs": 1,
"x": 660,
"y": 760,
"wires": [
[
"dbf50e2146f5e631"
]
]
},
{
"id": "96d60ca0976c555c",
"type": "mqtt out",
"z": "a8ec6104.cb08c",
"name": "",
"topic": "home/frontdoor/payload",
"qos": "",
"retain": "",
"respTopic": "",
"contentType": "",
"userProps": "",
"correl": "",
"expiry": "",
"broker": "8c74c5f6.9a7a48",
"x": 1010,
"y": 720,
"wires": []
},
{
"id": "ac3f66d770bb8f56",
"type": "function",
"z": "a8ec6104.cb08c",
"name": "If open",
"func": "var nvalue = msg.payload.nvalue;\nmsg.payload = {};\nif(nvalue == 1)\n{\nmsg.payload.state = \"ON\";\nreturn msg;\n} \n",
"outputs": 1,
"noerr": 0,
"initialize": "",
"finalize": "",
"libs": [],
"x": 490,
"y": 720,
"wires": [
[
"31cb1ca9e4060710",
"96d60ca0976c555c"
]
]
},
{
"id": "dbf50e2146f5e631",
"type": "function",
"z": "a8ec6104.cb08c",
"name": "Send Close",
"func": "msg.payload = {};\nmsg.payload.state = \"OFF\";\nreturn msg;",
"outputs": 1,
"noerr": 0,
"initialize": "",
"finalize": "",
"libs": [],
"x": 810,
"y": 760,
"wires": [
[
"96d60ca0976c555c"
]
]
},
{
"id": "8c74c5f6.9a7a48",
"type": "mqtt-broker",
"name": "MQTTSERVER",
"broker": "MQTTSERVER",
"port": "1883",
"clientid": "",
"usetls": false,
"compatmode": true,
"keepalive": "15",
"cleansession": true,
"birthTopic": "",
"birthQos": "0",
"birthPayload": "",
"closeTopic": "",
"closePayload": "",
"willTopic": "",
"willQos": "0",
"willPayload": ""
}
]

HA Part : Instead of the generic setup above (Old post part)
mqtt:
binary_sensor:
- name: "FrontDoor"
state_topic: "home/frontdoor/payload"
value_template: "{{ value_json.state }}"
device_class: door