I wrote a python script to generate binary data to include in my Arduino sketch.
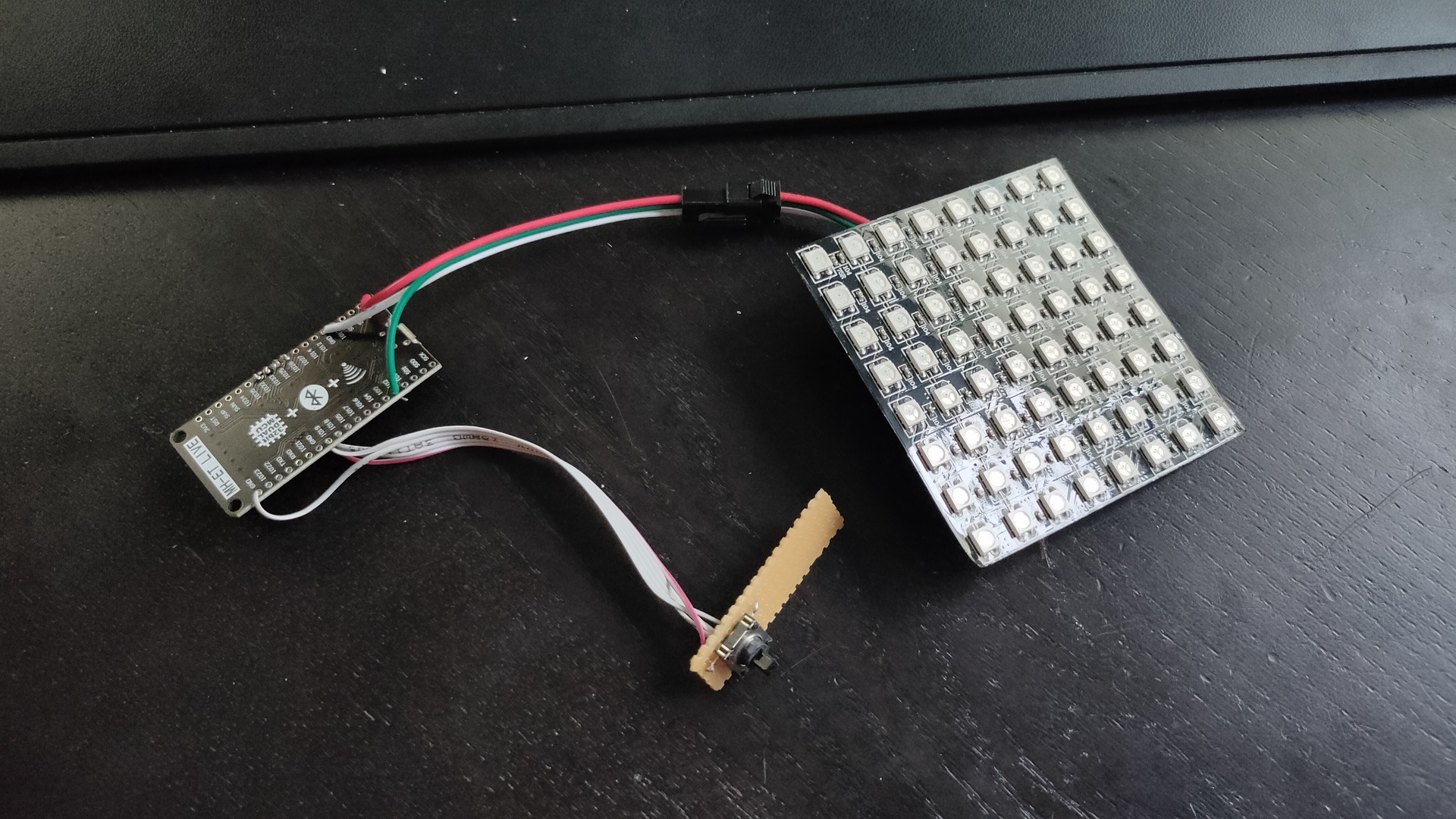
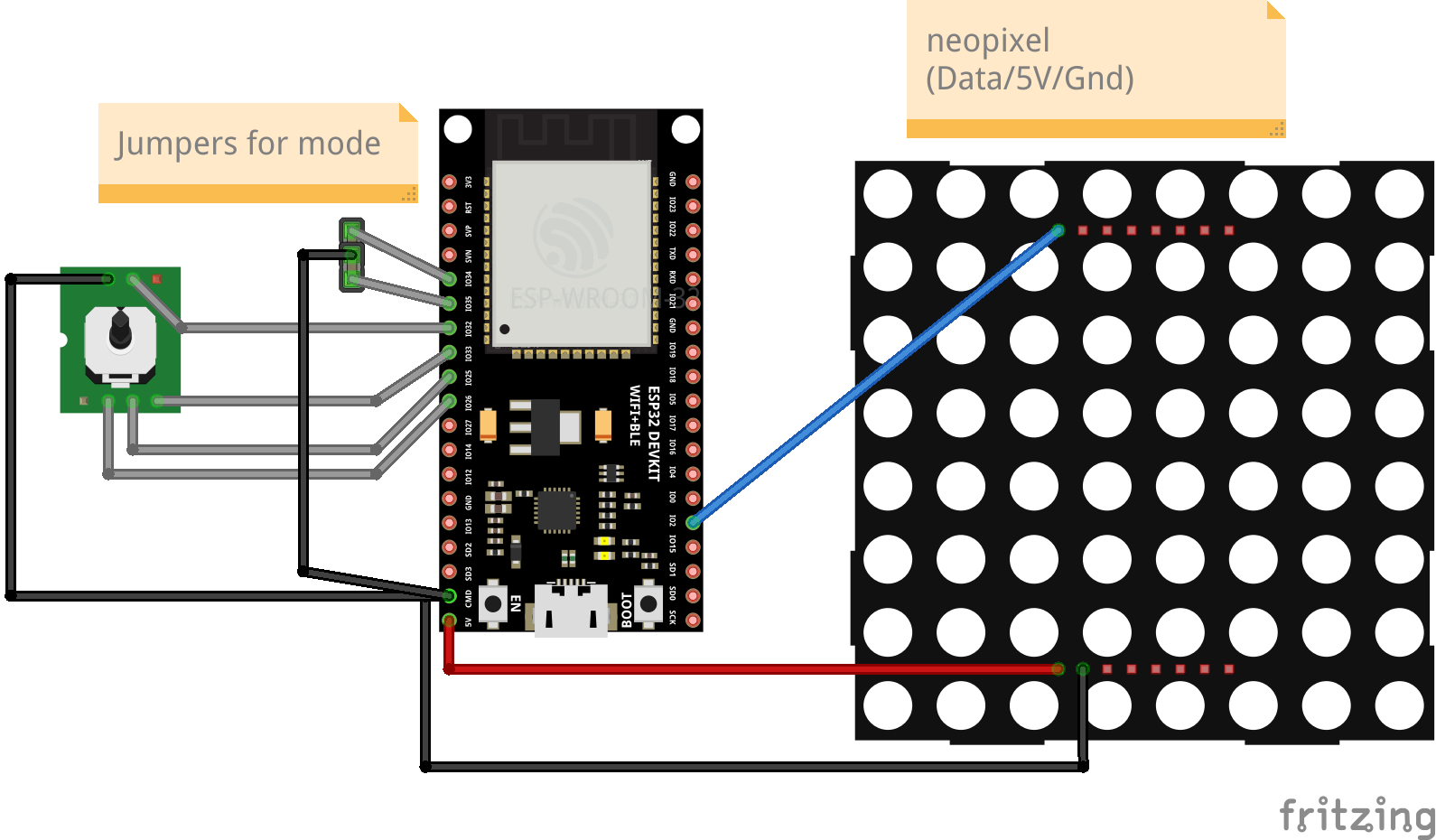
This Arduino displays codes send though MQTT.
https://en.wikipedia.org/wiki/Baudot_code
CODE:
python3 matrix.py apple gives me
byte apple_Char[8] = {
0b00000000,
0b01000100,
0b01111000,
0b00000000,
0b00110000,
0b00000000,
0b00111000,
0b00000000
};
Python Code
import sys
a = [
[0,0,0,0,0,0,0,0 ],
[0,0,0,0,0,0,0,0 ],
[0,0,0,0,0,0,0,0 ],
[0,0,0,0,0,0,0,0 ],
[0,0,0,0,0,0,0,0 ],
[0,0,0,0,0,0,0,0 ],
[0,0,0,0,0,0,0,0 ],
[0,0,0,0,0,0,0,0 ]
]
letters = [
[0,1,1,0,0,0,0,0 ],
[0,1,0,0,0,1,1,0 ],
[0,0,1,0,1,1,0,0 ],
[0,1,0,0,0,1,0,0 ],
[0,1,0,0,0,0,0,0 ],
[0,1,0,0,1,1,0,0 ],
[0,0,1,0,0,1,1,0 ],
[0,0,0,0,1,0,1,0 ],
[0,0,1,0,1,0,0,0 ],
[0,1,1,0,0,1,0,0 ],
[0,1,1,0,1,1,0,0 ],
[0,0,1,0,0,0,1,0 ],
[0,0,0,0,1,1,1,0 ],
[0,0,0,0,1,1,0,0 ],
[0,0,0,0,0,1,1,0 ],
[0,0,1,0,1,0,1,0 ],
[0,1,1,0,1,0,1,0 ],
[0,0,1,0,0,1,0,0 ],
[0,1,0,0,1,0,0,0 ],
[0,0,0,0,0,0,1,0 ],
[0,1,1,0,1,0,0,0 ],
[0,0,1,0,1,1,1,0 ],
[0,1,1,0,0,0,1,0 ],
[0,1,0,0,1,1,1,0 ],
[0,1,0,0,1,0,1,0 ],
[0,1,0,0,0,0,1,0 ]
]
number=0
word=str(sys.argv[1])
for col in range(len(word)) :
character=word[col]
number = ord(character) - 97
nextcol = col + 1
for row in range(len(a[col])) :
a[row][nextcol] = letters[number][row]
print("byte " + word + "_Char[8] = {")
for i in range(len(a)) :
print(" 0b", end = '')
for j in range(len(a[i])) :
print(a[i][j], end="")
if i < 7:
print(",")
print()
print("};")
Arduino test code
#include <ESP8266WiFi.h>
#include <PubSubClient.h>
#include <WiFiClient.h>
#include "WEMOS_Matrix_LED.h"
MLED mled(5); //set intensity=5
const char* wifi_ssid = "MYSSID"; // Enter your WiFi name
const char* wifi_password = "MYSSIDPASS"; // Enter WiFi password
const char* mqtt_server = "MYMQTTSERVER";
const int mqtt_port = 1883;
const char* mqttUser = "";
const char* mqttPassword = "";
#define MSG_BUFFER_SIZE (50)
char msg[MSG_BUFFER_SIZE];
int value = 0;
WiFiClient espClient;
PubSubClient mqtt(espClient);
void setup_wifi() {
delay(10);
WiFi.mode(WIFI_STA);
WiFi.begin(wifi_ssid, wifi_password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
}
}
byte clear_Char[8] = {
0b00000000,
0b00000000,
0b00000000,
0b00000000,
0b00000000,
0b00000000,
0b00000000,
0b00000000
};
byte baudot_Char[8] = {
0b11111111,
0b01101010,
0b00011100,
0b11111111,
0b00110100,
0b00010000,
0b00000100,
0b11111111
};
#define TIME 500
void setup() {
Serial.begin(115200);
setup_wifi();
mqtt.setServer(mqtt_server, mqtt_port);
WiFiClient espClient;
PubSubClient mqtt(espClient);
mqtt.setClient(espClient);
mqtt.setServer(mqtt_server, mqtt_port);
delay(500);
mqtt.subscribe("escape/matrixledin");
delay(500);
mqtt.setCallback(callback);
}
void callback(char* topic, byte* payload, unsigned int length) {
Serial.println("callback");
String topicStr = topic;
byte value = atoi((char*)payload);
snprintf (msg, MSG_BUFFER_SIZE, "%1d", value);
mqtt.publish("escape/matrixledout", msg);
if (value == 1){
drawChar(baudot_Char);
}else if (value == 0){
drawChar(cleat_Char);
}else if (value == 2){
drawChar(test_Char);
}else if (value == 3){
drawChar(no_Char);
}
}
void reconnect() {
while (!mqtt.connected()) {
String clientId = "matrixClient-";
clientId += String(random(0xffff), HEX);
if (mqtt.connect(clientId.c_str())) {
mqtt.publish("escape/outTopic", "hello from 8x8led module");
Serial.println("resubscribe");
mqtt.subscribe("escape/matrixledin");
mqtt.setCallback(callback);
} else {
// Wait 5 seconds before retrying
delay(5000);
}
}
}
void loop() {
if (!mqtt.connected()) {
Serial.println("reconnect called");
reconnect();
}
mqtt.loop();
}
void drawChar(byte character[8]) {
for(int y=7;y>=0;y--) {
for (int x=0; x <= 7; x++) {
if (character[(7-y)] & (B10000000 >> x)) {
mled.dot(x,y); // draw dot
} else {
mled.dot(x,y,0);//clear dot
}
}
mled.display();
}
}