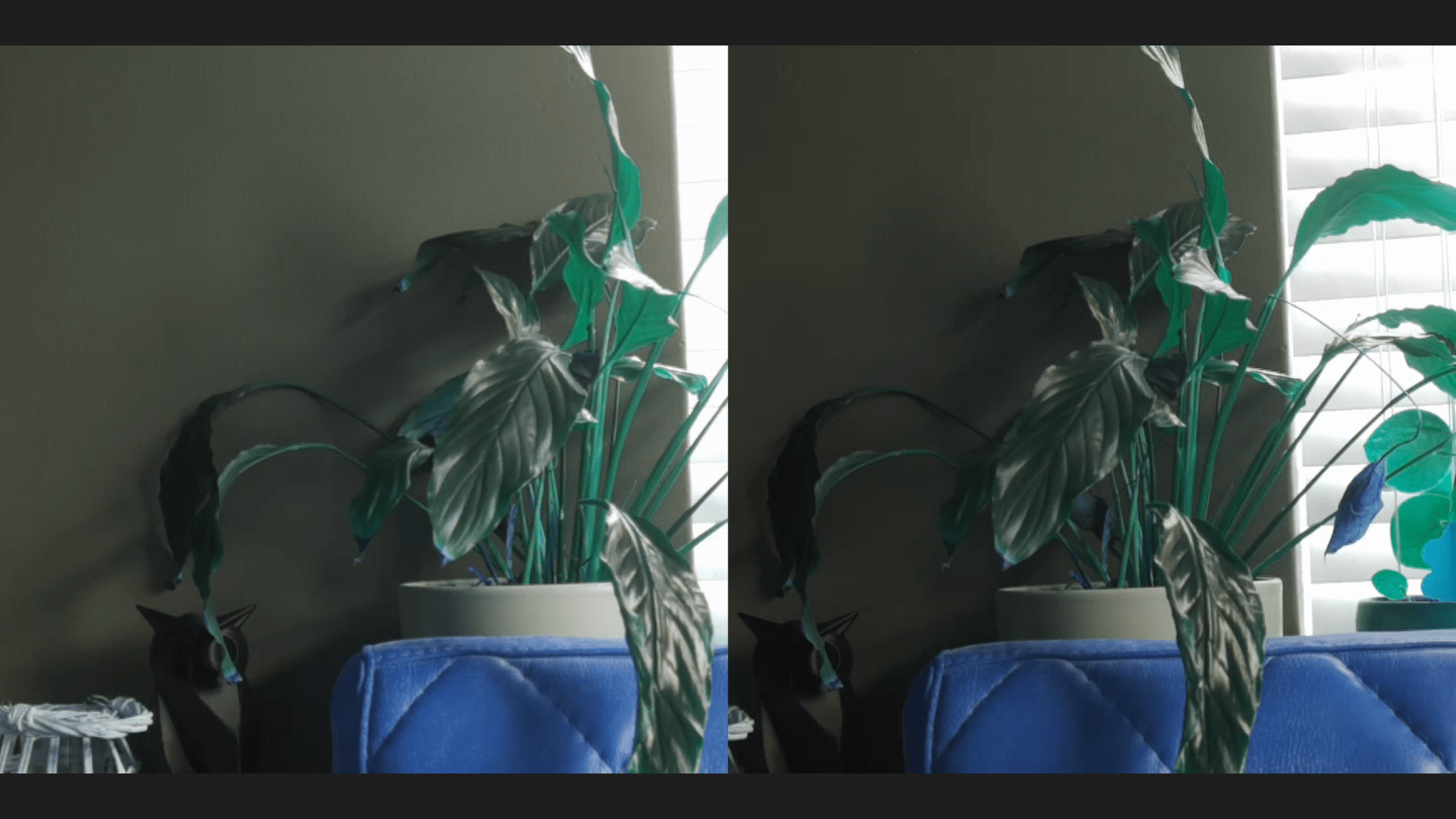
Above a screenshot of a browser screen (Left and Right in fullscreen)
Colors are a little of (codec Red/Blue problem?)
But the setup works!

I used a android phone in above setup.
I tried a Quest 2 VR set, but I couldn’t get the browser in full screen mode. (YET)
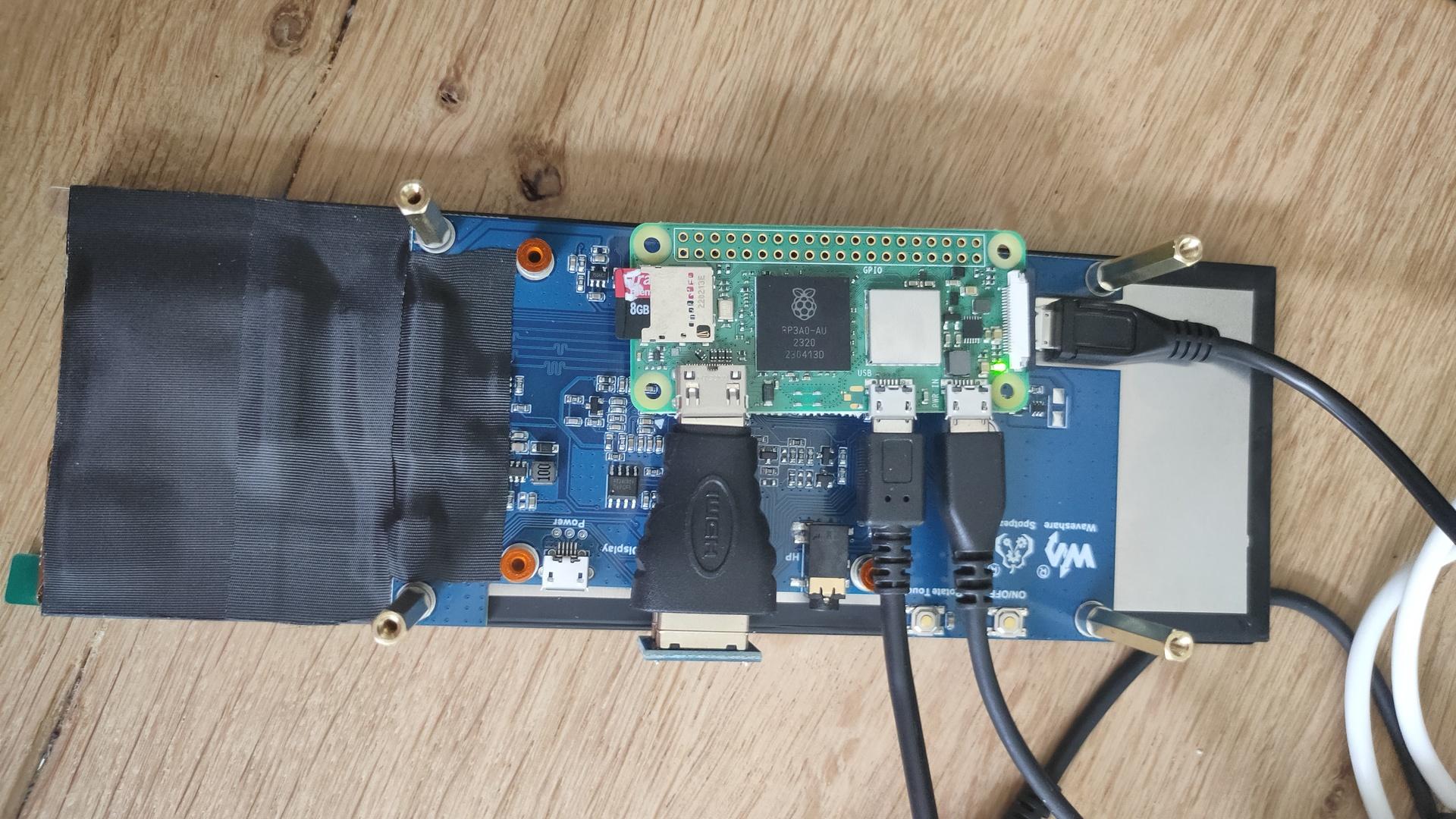
Hardware setup


Two Raspberry Pi Camera Modules, connected via the two 4lane-MIPI DSI/CSI connectors.
Manually focussed and using some 3D printed stands on a piece of wood will do for now.
I build a RTSP NGinx proxy to test, which I previously used for OBS. But there was too much latency.
So I used below webrtc setup, with a latency below 80ms.
(I previously did some test using Janus)
CODE:
wget https://github.com/bluenviron/mediamtx/releases/download/v1.16.1/mediamtx_v1.16.1_linux_arm64.tar.gz tar xzvf media* cp mediamtx.yml mediamtx.org
NEW mediamtx.yml
webrtc: yes
webrtcAddress: :8889
rtmp: yes
rtmpAddress: :1935
paths:
dualcam:
source: publisher
run it
./mediamtx mediamtx.yml
Next make a streamer.
This Python script takes two square camera inputs, merge them side-by-side to one image and pushed the H264 frame to MediaMTX
import numpy as np
from picamera2 import Picamera2
import subprocess
import time
#WIDTH = 1280
WIDTH = 720
HEIGHT = 720
FPS = 30
BITRATE = "2500k"
RTMP_URL = "rtmp://127.0.0.1:1935/dualcam" # MediaMTX RTMP
# FFmpeg raw frames / H.264
ffmpeg_cmd = [
"ffmpeg",
"-y",
"-f", "rawvideo",
"-pix_fmt", "bgr24",
"-s", f"{WIDTH*2}x{HEIGHT}",
"-r", str(FPS),
"-i", "-",
"-c:v", "libx264",
"-preset", "ultrafast",
"-tune", "zerolatency",
"-b:v", BITRATE,
"-g", str(FPS), # keyframe every second
"-x264-params", "keyint=30:min-keyint=30:no-scenecut=1",
"-pix_fmt", "yuv420p",
"-f", "flv",
RTMP_URL
]
ffmpeg = subprocess.Popen(ffmpeg_cmd, stdin=subprocess.PIPE, bufsize=0)
picam0 = Picamera2(0)
picam1 = Picamera2(1)
cfg0 = picam0.create_video_configuration(
main={"size": (WIDTH, HEIGHT), "format": "BGR888"}, controls={"FrameRate": FPS}
)
cfg1 = picam1.create_video_configuration(
main={"size": (WIDTH, HEIGHT), "format": "BGR888"}, controls={"FrameRate": FPS}
)
picam0.configure(cfg0)
picam1.configure(cfg1)
picam0.start()
picam1.start()
print("Streaming to MediaMTX via RTMP...")
try:
while True:
f0 = picam1.capture_array()
f1 = picam0.capture_array()
combined = np.hstack((f0, f1))
ffmpeg.stdin.write(combined.tobytes())
time.sleep(1/FPS)
except KeyboardInterrupt:
print("Stopping...")
finally:
picam0.stop()
picam1.stop()
ffmpeg.stdin.close()
ffmpeg.wait()
Open using http://REMOTEIP:8889/dualcam