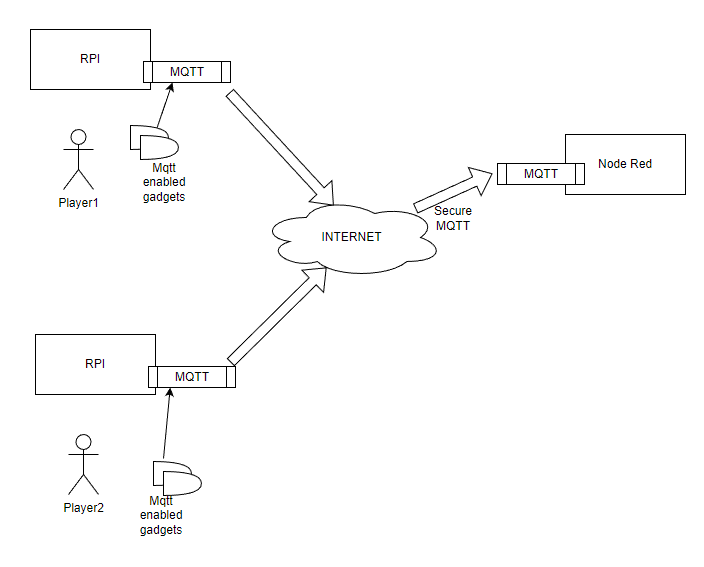
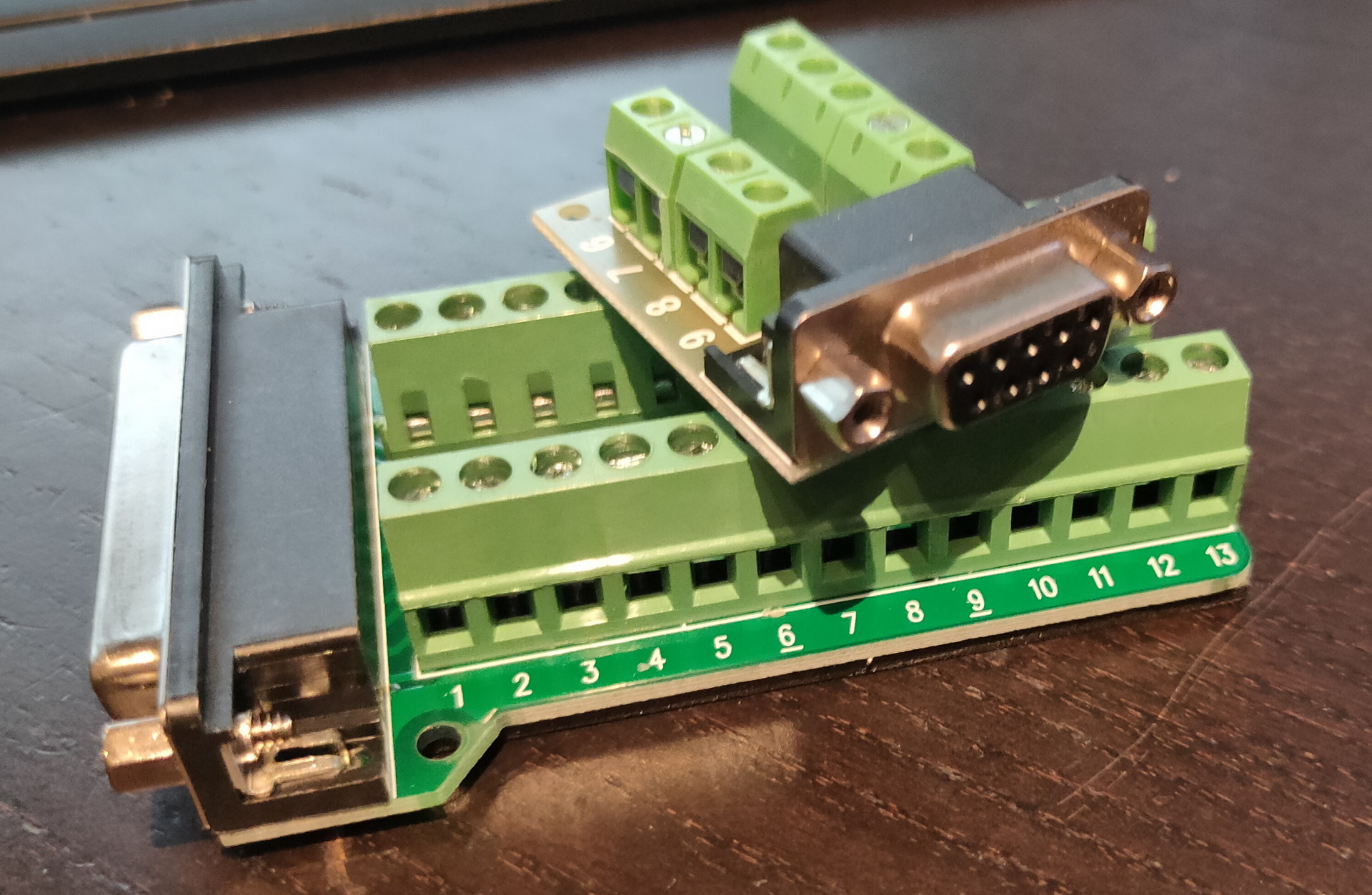
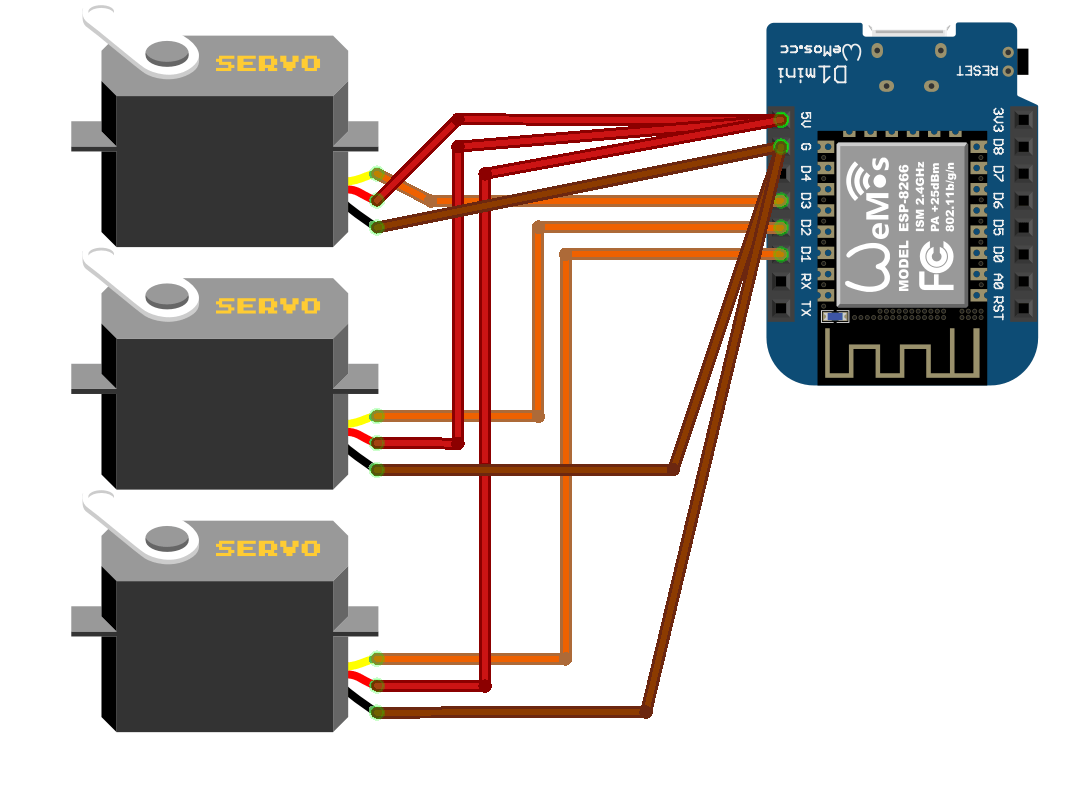
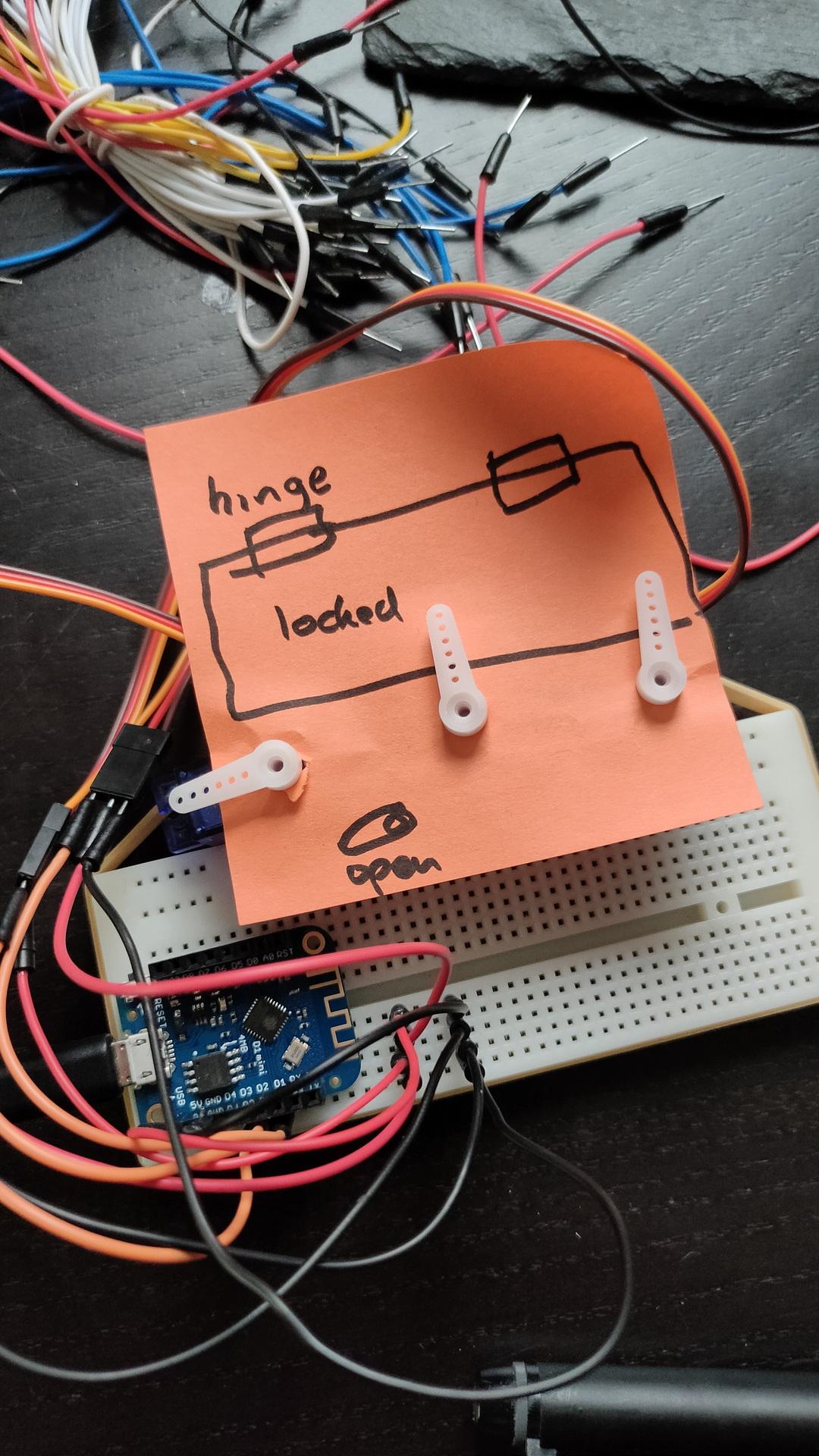
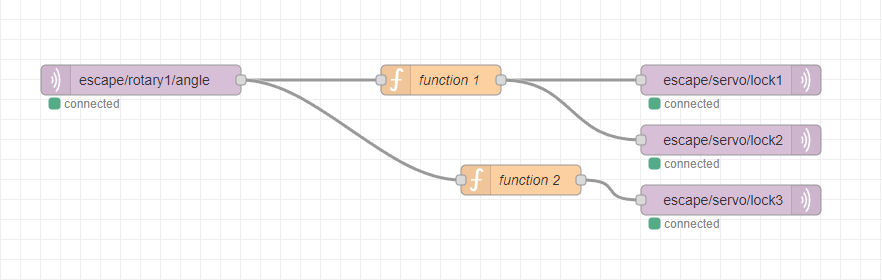
Multiple rotary encoders are controlling a servo based lock. 3 players have to work together to open the lock.
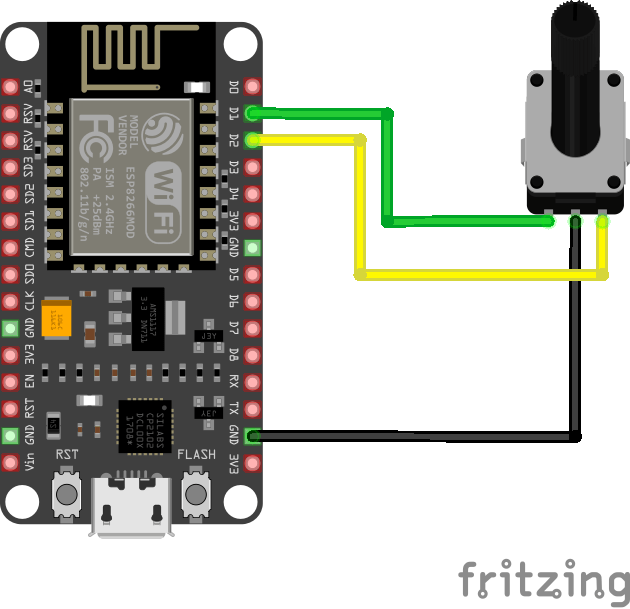
Arduino Rotary button (mqtt)
#include <ESP8266WiFi.h>
#include <WiFiClientSecure.h>
#include <time.h>
#include <PubSubClient.h>
#define encoderCLK 5 //D1
#define encoderDT 4 //D2
int servoAngle = 0;
int crntCLK;
int prvsCLK;
String myString;
char ang[50];
#ifndef SECRET
const char ssid[] = "MYSSID";
const char pass[] = "MSSIDPASS";
#define HOSTNAME "rotary1"
const char MQTT_HOST[] = "securemqttserver";
const int MQTT_PORT = 8883;
const char MQTT_USER[] = "user"; // leave blank if no credentials used
const char MQTT_PASS[] = "pass"; // leave blank if no credentials used
const char MQTT_SUB_TOPIC[] = "escape/" HOSTNAME "/in";
const char MQTT_PUB_TOPIC[] = "escape/" HOSTNAME "/out";
const char MQTT_PUB_TOPIC_angle[] = "escape/" HOSTNAME "/angle";
#ifdef CHECK_CA_ROOT
static const char digicert[] PROGMEM = R"EOF(
-----BEGIN CERTIFICATE-----
MIIFtTCCA52gAwIBAgIUXEEQRLHhYox8a95YiAYX/wQ/XeMwDQYJKoZIhvcNAQEN
----8< snip snap
CyLjTT2rtllw==
-----END CERTIFICATE-----
)EOF";
#endif
#ifdef CHECK_PUB_KEY
// Extracted by: openssl x509 -pubkey -noout -in ca.crt
static const char pubkey[] PROGMEM = R"KEY(
-----BEGIN PUBLIC KEY-----
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxx
-----END PUBLIC KEY-----
)KEY";
#endif
#ifdef CHECK_FINGERPRINT
// Extracted by: openssl x509 -fingerprint -in ca.crt
static const char fp[] PROGMEM = "AA:BB:CC:DD:EE:FF:00:11:22:33:44:55:66:77:88:99:AA:BB:CC:DD";
#endif
#endif
//////////////////////////////////////////////////////
#if (defined(CHECK_PUB_KEY) and defined(CHECK_CA_ROOT)) or (defined(CHECK_PUB_KEY) and defined(CHECK_FINGERPRINT)) or (defined(CHECK_FINGERPRINT) and defined(CHECK_CA_ROOT)) or (defined(CHECK_PUB_KEY) and defined(CHECK_CA_ROOT) and defined(CHECK_FINGERPRINT))
#error "cant have both CHECK_CA_ROOT and CHECK_PUB_KEY enabled"
#endif
BearSSL::WiFiClientSecure net;
PubSubClient client(net);
time_t now;
unsigned long lastMillis = 0;
void mqtt_connect()
{
while (!client.connected()) {
Serial.print("Time: ");
Serial.print(ctime(&now));
Serial.print("MQTT connecting ... ");
if (client.connect(HOSTNAME, MQTT_USER, MQTT_PASS)) {
Serial.println("connected.");
client.subscribe(MQTT_SUB_TOPIC);
} else {
Serial.print("failed, status code =");
Serial.print(client.state());
Serial.println(". Try again in 5 seconds.");
/* Wait 5 seconds before retrying */
delay(5000);
}
}
}
void receivedCallback(char* topic, byte* payload, unsigned int length) {
Serial.print("Received [");
Serial.print(topic);
Serial.print("]: ");
for (int i = 0; i < length; i++) {
Serial.print((char)payload[i]);
}
}
void setup()
{
pinMode (encoderCLK,INPUT_PULLUP);
pinMode (encoderDT,INPUT_PULLUP);
prvsCLK = digitalRead(encoderCLK);
Serial.begin(115200);
Serial.println();
Serial.println();
Serial.print("Attempting to connect to SSID: ");
Serial.print(ssid);
WiFi.hostname(HOSTNAME);
WiFi.mode(WIFI_STA);
WiFi.begin(ssid, pass);
while (WiFi.status() != WL_CONNECTED)
{
Serial.print(".");
delay(1000);
}
Serial.println("connected!");
Serial.print("Setting time using SNTP");
configTime(1 * 3600, 0, "pool.ntp.org", "time.nist.gov");
now = time(nullptr);
while (now < 1510592825) {
delay(500);
Serial.print(".");
now = time(nullptr);
}
Serial.println("done!");
struct tm timeinfo;
gmtime_r(&now, &timeinfo);
Serial.print("Current time: ");
Serial.print(asctime(&timeinfo));
#ifdef CHECK_CA_ROOT
BearSSL::X509List cert(digicert);
net.setTrustAnchors(&cert);
#endif
#ifdef CHECK_PUB_KEY
BearSSL::PublicKey key(pubkey);
net.setKnownKey(&key);
#endif
#ifdef CHECK_FINGERPRINT
net.setFingerprint(fp);
#endif
#if (!defined(CHECK_PUB_KEY) and !defined(CHECK_CA_ROOT) and !defined(CHECK_FINGERPRINT))
net.setInsecure();
#endif
client.setServer(MQTT_HOST, MQTT_PORT);
client.setCallback(receivedCallback);
mqtt_connect();
}
void loop()
{
crntCLK = digitalRead(encoderCLK);
if (crntCLK != prvsCLK){
// If the encoderDT state is different than the encoderCLK state then the rotary encoder is rotating counterclockwise
if (digitalRead(encoderDT) != crntCLK) {
servoAngle ++;
}
else {
servoAngle --;
}
Serial.println(servoAngle);
String myString = String(servoAngle);
myString.toCharArray(ang, myString.length() + 1);
client.publish(MQTT_PUB_TOPIC_angle, ang, false);
}
prvsCLK = crntCLK;
now = time(nullptr);
if (WiFi.status() != WL_CONNECTED)
{
Serial.print("Checking wifi");
while (WiFi.waitForConnectResult() != WL_CONNECTED)
{
WiFi.begin(ssid, pass);
Serial.print(".");
delay(10);
}
Serial.println("connected");
}
else
{
if (!client.connected())
{
mqtt_connect();
}
else
{
client.loop();
}
}
if (millis() - lastMillis > 5000) {
lastMillis = millis();
client.publish(MQTT_PUB_TOPIC, ctime(&now), false);
}
}
Arduino 3 servos using mqtt
#include <ESP8266WiFi.h>
#include <PubSubClient.h>
#include <Servo.h>
Servo lock1;
Servo lock2;
Servo lock3;
const char* ssid = "MYSSID"; // WiFi SSID
const char* password = "MYSSIDPASS"; // WiFi Password
const char* mqtt_server = "MQTTSERVER"; // IP Broker MQTT
const char* topic_lock1 = "escape/servo/lock1";
const char* topic_lock2 = "escape/servo/lock2";
const char* topic_lock3 = "escape/servo/lock3";
WiFiClient espClient;
PubSubClient client(espClient);
long lastMsg = 0;
char msg[50];
int value = 0;
void setup() {
Serial.begin(115200);
lock1.attach(D1);
lock2.attach(D2);
lock3.attach(D3);
setup_wifi();
client.setServer(mqtt_server, 1883);
client.setCallback(callback);
}
void setup_wifi() {
delay(10);
// We start by connecting to a WiFi network
Serial.println();
Serial.print("Connecting to ");
Serial.println(ssid);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
Serial.println("IP address: ");
Serial.println(WiFi.localIP());
}
void callback(char* topic, byte* payload, unsigned int length) {
String string;
Serial.print("Message arrived [");
Serial.print(topic);
Serial.print("] ");
for (int i = 0; i < length; i++) {
string+=((char)payload[i]);
}
Serial.print(string);
Serial.print(" toInt ");
int pos = string.toInt();
Serial.println(pos);
if ( strcmp(topic, topic_lock1) == 0 ) {
Serial.print("lock1 ");
Serial.println(pos);
lock1.write(pos);
}
if ( strcmp(topic, topic_lock2) == 0 ) {
Serial.print("lock2 ");
Serial.println(pos);
lock2.write(pos);
}
if ( strcmp(topic, topic_lock3) == 0 ) {
Serial.print("lock3 ");
Serial.println(pos);
lock3.write(pos);
}
delay(15);
}
void reconnect() {
// Loop until we're reconnected
while (!client.connected()) {
Serial.print("Attempting MQTT connection...");
// Attempt to connect
if (client.connect("ESP8266servolocks")) {
Serial.println("connected");
client.subscribe(topic_lock1);
client.subscribe(topic_lock2);
client.subscribe(topic_lock3);
} else {
Serial.print("failed, rc=");
Serial.print(client.state());
Serial.println(" try again in 5 seconds");
// Wait 5 seconds before retrying
delay(5000);
}
}
}
void loop() {
if (!client.connected()) {
reconnect();
}
client.loop();
delay(100);
}